




제어쟁이
@insid2embedded
수강생
500
수강평
65
강의 평점
4.9
안녕하세요.
"인사이드 임베디드"라는 유튜브/네이버 블로그를 운영하고 있고 전동화(모터·인버터) 분야에서 회로/PCB/펌웨어/제어까지 실무적으로 다뤄온 경험을 바탕으로, 임베디드 개발자를 위한 교육 콘텐츠를 제작하고 있습니다:)
카페 : https://cafe.naver.com/insideembedded?iframe_url=/MyCafeIntro.nhn%3Fclubid=31273003
블로그 : https://blog.naver.com/sw_engineer-
유튜브 : https://www.youtube.com/@Inside_Embedded
오픈채팅방 : https://open.kakao.com/o/gsUVs3Uh
3상 인버터 하드웨어 개발
글로벌 자동차 OEM 협업
전동화 시스템 개발/검증 경험
양산/검증 프로세스 경험
BLDC/PMSM 제어 알고리즘 개발
WFSM(권선형 계자 동기전동기)제어 알고리즘 개발
실차/벤치 기반 평가 경험
강의
로드맵
전체 1
수강평
- PMSM 벡터제어 완전정복 - 이론, Matlab, STM32 실습까지!
- PMSM 벡터제어 완전정복 - 이론, Matlab, STM32 실습까지!
- PMSM 벡터제어 완전정복 - 이론, Matlab, STM32 실습까지!
- PMSM 벡터제어 완전정복 - 이론, Matlab, STM32 실습까지!


게시글
질문&답변
벅컨버터 사용 및 그라운드 분리
안녕하세요, 제어쟁이입니다.먼저 강의 수강해주셔서 정말 감사합니다. ㅎㅎ1번 답변강의자료를 바탕으로 설명드리면, 이번 교육용 인버터 키트에서 절연형 DC/DC 컨버터가 아니라 Buck 컨버터를 사용한 가장 큰 이유는 교육용 키트라는 목적, 전압대, 원가, 회로 복잡도를 함께 고려했기 때문입니다. 현재 키트는 24V / 36V 정도의 비교적 저전압 배터리 시스템을 대상으로 하고 있어서, 산업용 고전압 인버터처럼 반드시 절연 전원을 써야 하는 구조는 아닙니다.물론 절연형 DC/DC를 사용하면 고전압 영역과 저전압 제어 영역을 전기적으로 분리할 수 있어서 안전성이나 공통모드 노이즈 측면에서 유리한 점이 있습니다. 그래서 실제 산업 현장에서도 전압이 높아지거나 안전 규격 요구가 큰 경우에는 절연형을 많이 사용합니다. 다만 절연형을 제대로 적용하려면 전원만 절연한다고 끝나는 것이 아니라 PWM 신호, 전류센싱, Fault 신호, 통신 신호까지 전체 시스템 절연 구조를 함께 잡아야 해서 회로가 훨씬 복잡해지고 비용도 올라갑니다. 그리고 한 가지 중요한 점은 절연형을 쓴다고 해서 노이즈가 자동으로 완벽하게 해결되는 것은 아니라는 것입니다. 실제 노이즈 성능은 PCB 레이아웃, 리턴패스, 디커플링, 접지 구조, 게이트 저항, 스너버 같은 요소의 영향도 매우 큽니다. 그래서 이번 키트는 학습 목적에 맞게 비절연 구조로 설계했고, 대신 PGND와 GND를 분리해서 고전류 스위칭 리턴 전류가 MCU나 ADC 쪽으로 최대한 영향을 주지 않도록 설계한 것입니다. 즉 “절연을 안 해서 대충 만든 것”이 아니라, 현재 전압대와 교육 목적에 맞는 현실적인 선택이라고 이해하시면 좋겠습니다. 실제 산업에서는 고전압인 경우에는 게이트드라이버나 컨버터는 거의 필수적으로 절연형을 사용하고 있습니다.2번 답변이 부분은 처음 공부하실 때 많이 헷갈릴 수 있는데,결론은 스위칭 주파수와 모터 회전 속도는 같은 개념이 아니다라고 보시면 됩니다. 강의자료 기준으로 현재 3상 PWM은 TIM1 하나로 생성하고 있기 때문에 U상, V상, W상의 기본 PWM 캐리어 주파수는 동일합니다. 예를 들어 20kHz로 설정하면 세 상 모두 20kHz 기준으로 PWM이 만들어집니다. 다만 BLDC 6step 제어에서는 홀센서 위치에 따라 항상 세 상이 동시에 같은 방식으로 동작하는 것이 아니라, 두 상은 통전하고 한 상은 off(floating) 되는 형태로 구동됩니다. 그리고 RPM은 PWM 주파수로 직접 결정되는 것이 아니라, 모터에 인가되는 평균 전압과 전류, 부하 상태, 전기적 주파수에 의해 결정됩니다. 쉽게 말하면 PWM 주파수는 MOSFET을 얼마나 빠르게 켰다 껐다 할지를 정하는 값이고, 속도는 쓰로틀에 따라 duty를 조절하면서 평균 전압이 바뀌고, 그 결과 모터 토크와 속도가 변하는 구조입니다. 그래서 duty를 올리면 평균 전압이 증가하고, 그에 따라 모터가 더 가속되어 RPM이 올라갑니다. 반대로 스위칭 주파수는 너무 낮으면 전류 리플, 소음, 토크 리플이 커질 수 있고, 너무 높이면 MOSFET 스위칭 손실과 발열이 증가합니다. 즉PWM 주파수는 효율, 발열, 소음, EMI를 보고 정하는 값이고, RPM은 평균적으로 모터에 얼마만큼의 전압/전류를 넣어주느냐에 더 직접적으로 관련된 값이라고 이해하시면 가장 정확합니다.3번 답변이 질문도 실무에서 정말 많이 고민하는 부분입니다. 결론부터 말씀드리면,PGND와 GND를 연결할 때 0Ω 저항 대신 Ferrite Bead를 쓰는 것이 무조건 더 좋다고 보기는 어렵습니다. 0Ω 저항은 사실상 short처럼 동작하면서도, 설계자 입장에서는 “이 지점에서 ground를 한 번 묶는다”는 의미를 명확하게 줄 수 있고, 나중에 부품을 바꿔가며 튜닝하기도 좋습니다.반면 Ferrite Bead는 DC에서는 거의 연결처럼 보이지만, 고주파에서는 임피던스가 커져서 특정 주파수 대역의 노이즈를 줄이는 데 도움을 줄 수 있습니다. 그래서 겉으로 보면 bead가 더 좋아 보일 수 있습니다. 하지만 인버터처럼 스위칭 전류가 크고 di/dt, dv/dt가 큰 회로에서는 bead 양단에 전위차가 생기면서 오히려 그라운드 기준점이 흔들리는 문제가 발생할 수 있습니다. 그러면 ADC 측정값이 흔들리거나 MCU 기준 전위가 불안정해지고, 심하면 통신 오류나 오동작으로 이어질 수도 있습니다. 그래서 실제로 중요한 것은 0Ω이냐 bead냐 자체보다, 고전류 리턴패스와 민감한 신호 리턴패스를 최대한 분리하고, 루프 면적을 줄이고, ground를 어디서 어떻게 만나게 할 것인지를 잘 잡는 것입니다. 실무에서도 처음부터 무조건 bead가 정답이라고 결정하기보다는, 0Ω 자리를 넣어두고 시제품에서 오실로스코프 측정, EMI, 실제 부하 테스트를 하면서 bead로 바꿔보거나 다른 방식으로 튜닝하는 경우가 많습니다. 즉 이 부분은 이론만으로 100% 정답이 정해지는 영역이라기보다는, 초기 설계를 잘 하고 실제 측정 결과를 바탕으로 최적점을 찾는 과정이라고 보시면 됩니다.
- 좋아요수
- 0
- 댓글수
- 2
- 조회수
- 30
질문&답변
EEPROM I2C 풀업저항
안녕하세요. 좋은 질문 감사합니다.본 강의에서는 EEPROM을 직접 다루지는 않아서 회로 설명이 충분하지 않았을 수 있습니다.해당 부분은 교육용 보드에서 EEPROM과 MCU 간 pcb상에서의 물리적인 거리를 짧게 설계하였고,stm32f767의 내부 풀업저항을 사용하려고 한 구성입니다. 교육용 실습 환경처럼 배선 길이가 짧고 통신 조건이 비교적 단순한 경우에는 내부 풀업으로도 동작 가능합니다.다만 일반적으로 I2C 통신에서는 통신 속도, 배선 길이, 버스 용량 등의 조건에 따라 외부 풀업저항을 추가하는 것이 더 안정적인 경우가 많습니다. 그래서 실제 제품 설계나 배선 조건이 달라지는 환경에서는 외부 풀업저항을 넣는 방식도 함께 검토하시는 것이 좋습니다.추가 질문 사항 있으시면 언제든지 문의주세요~!감사합니다:)
- 좋아요수
- 0
- 댓글수
- 2
- 조회수
- 32
질문&답변
센서리스 속도제어기의 Feedback RPM에 따른 속도 진동
안녕하세요. 질문 주신 내용 잘 봤습니다.말씀하신 것처럼 I/F 제어 구간까지는 잘 따라가다가 센서리스 모드로 전환되는 순간 진동이 생기는 경우, 전환 시점의 과도응답 영향도 물론 있을 수 있습니다. 다만 실제로는 제어모드 전환 자체만의 문제가 아니라, 센서리스 알고리즘에서 추정한 속도값이나 각도값이 전환 직후 충분히 안정되지 않은 상태에서 속도제어 feedback으로 바로 들어가면서 진동이 이어지는 경우가 많습니다. 또한 추정기 게인이 너무 큰 경우에 진동이 발생하게 됩니더. 특히 역기전력 기반 센서리스는 저속이나 전환 경계 구간에서 추정값이 민감해질 수 있어서, 추정 RPM이 흔들리면 속도제어기 출력도 같이 흔들리고, 그 결과 다시 추정이 더 흔들리는 형태로 진동이 지속될 수 있습니다. 이 경우에는 역기전력 센서리스 쪽 게인을 조금 더 튜닝해보면 진동이 완화되는 경우가 많습니다. 전환 시점 주변에서 추정 속도값이 얼마나 출렁이는지 먼저 확인해보시고, 필요하면 센서리스 추정부의 게인이나 필터 관련 파라미터를 조정해보시는 것을 권장드립니다. 추가로 전환 시점에서 속도제어기에 들어가는 feedback 신호의 연속성, 초기값 전달, 필터링 상태도 같이 확인해보시면 좋습니다. 해당 부분은 저도 한 번 더 보완해서, 5월 초중순까지 강의 업데이트하면서 설명이나 내용 보강을 진행할 예정입니다. 감사합니다.
- 좋아요수
- 0
- 댓글수
- 1
- 조회수
- 25
질문&답변
측정관련 질문
안녕하세요, 제어쟁이입니다.좋게 봐주셔서 감사합니다.질문 주신 부분 답변드리면,우선 오실로스코프로 확인해보실 때는 스위치의 드레인-소스 전압 Vds 파형과 PWM 출력 파형을 먼저 같이 찍어보시는 것을 추천드립니다.이 두 가지를 같이 보면 실제로 PWM 신호가 어떻게 나가고 있는지, 그리고 그에 따라 스위칭 시점에서 전압이 어떻게 변하는지를 가장 기본적으로 확인할 수 있습니다.보통은 아래 쪽을 우선적으로 보시면 됩니다.MCU 또는 게이트드라이버에서 나가는 PWM 출력 파형MOSFET의 게이트-소스 전압 VgsMOSFET의 드레인-소스 전압 Vds가능하다면 상전류 파형PWM이 정상적으로 출력되는지 확인하려면 먼저 PWM 출력 자체를 보고,실제로 스위치가 제대로 켜지고 꺼지는지는 Vgs와 Vds를 보면 됩니다.그리고 모터 구동 시 전압 변화나 스위칭 노이즈를 보려면 Vds 파형이 가장 직접적입니다.특히 Vds 파형을 보면 스위칭 순간의 링잉, 오버슈트, 턴온/턴오프 시점의 변화 등을 확인할 수 있어서,단순히 PWM이 나간다 수준이 아니라 실제 전력단에서 어떤 일이 일어나는지를 파악하는 데 도움이 됩니다.그리고 데드타임 부분은 정정해서 말씀드리면,200ms가 아니라 200ns 정도의 아주 짧은 시간부터 시작하는 개념으로 보셔야 합니다.실제로는 보통 수백 ns에서 수 us 범위에서 조정하게 되고,이 값은 단순히 감으로 정하는 것이 아니라MOSFET 데이터시트의 turn-on delay, turn-off delaygate driver 특성실제 회로 배선 상태스위칭 파형 측정 결과이런 것들을 같이 보고 정하게 됩니다.즉, 데드타임은 단순히 200ns부터 1us까지 무조건 순차적으로 넣어보는 개념이라기보다는,데이터시트 기반으로 대략적인 시작점을 잡고,그 다음 실제 파형을 보면서 shoot-through가 없는지, 바디다이오드 도통이 과하지 않은지, 파형 왜곡이 심하지 않은지를 확인하면서 조정하는 방식에 가깝습니다.질문 주신 것처럼 모터 전압만 보면 데드타임 차이가 아주 크게 안 보일 수도 있습니다.그래서 데드타임 영향은 모터 전압 파형만으로 판단하는 것보다 상전류 파형에서 훨씬 더 분명하게 보이는 경우가 많습니다.추가로 말씀드리면,데드타임의 영향을 가장 확실하게 보기 좋은 파형은 상전류 파형입니다.데드타임이 너무 짧으면 shoot-through 위험이 생길 수 있고,반대로 너무 길면 전압 왜곡이 생기면서 전류 파형이 찌그러지거나 리플이 증가할 수 있습니다.특히 저속이나 전류가 작은 구간에서는 이런 왜곡이 더 눈에 띄게 보일 수 있습니다.정리해서 말씀드리면,우선은 PWM 출력 파형과 스위치의 드레인-소스 전압 Vds 파형을 먼저 찍어보시고,가능하면 상전류 파형까지 같이 확인해보시는 것이 가장 좋습니다.추가 질문사항 있으시면 댓글 부탁드립니다.감사합니다!
- 좋아요수
- 0
- 댓글수
- 1
- 조회수
- 46
질문&답변
V/F 전압 제어
안녕하세요, 제어쟁이입니다.질문 주셔서 감사합니다.말씀주신 내용 기준으로 답변드리면,theta_I 부분을 주석 처리하면 모터가 바로 회전하지 않는 것이 정상일 가능성이 큽니다.해당 부분은 전기각에 해당하는 sin/cos 값을 만들거나 참조하는 역할이라, 이 값이 정상적으로 들어가지 않으면 좌표변환이나 전압 인가 방향이 맞지 않아서 회전자계를 제대로 만들 수 없습니다.그래서 RpmRef를 주더라도 모터가 돌지 않을 수 있습니다.다만 이 부분은 현재 사용 중이신 코드가강의 중간 실습용 코드인지스테이트플로우가 포함된 최종 코드인지에 따라 확인 포인트가 조금 달라집니다.만약 최종 코드 기반으로 실습 중이시라면, 스테이트플로우 쪽에서 theta 생성이나 운전 모드 전환에 관여하는 부분이 있을 수 있어서, 단순히 theta_I만 주석 처리하면 의도한 동작이 안 나올 수 있습니다.반대로 강의 내용을 따라 직접 수정하신 코드라면, 어떤 부분을 변경하셨는지에 따라 충분히 다른 결과가 나올 수 있습니다.이 부분은 현재 사용 중인 코드 일부를 같이 봐야 정확하게 판단할 수 있습니다.가능하시면 관련 부분을 캡처해서 보여주시면 더 구체적으로 설명드리겠습니다.VdeSet = 1일 때 강의보다 전류가 작게 나오는 부분은, 코드 문제일 수도 있지만 그것만이 원인은 아닙니다. 이론적으로는 조건이 동일하다면 비슷한 전류가 나와야 합니다. theta를 0으로 설정하고 하신건지 확인 부탁드립니다.V/F 강의에서 d축 전압을 바꾼 이유는, q축 전류 제어를 정식으로 한다기보다 실습상 동작을 단순하게 보여주기 위한 목적이 더 큽니다.벡터제어 관점에서 보면,q축: 토크와 직접 관련d축: 자속 방향 성분으로 이해하는 것이 맞습니다.그래서 일반적인 PMSM 토크 제어에서는 q축 전류를 주로 제어하는 것이 맞습니다.다만 강의 해당 구간에서는 완성된 폐루프 전류제어기를 설명하는 목적보다는,전압 인가에 따라 전류가 어떻게 보이는지, 그리고 회전이 어떻게 형성되는지를 실습으로 보여드리기 위해 비교적 단순한 방식으로 진행한 것입니다.즉, 여기서 d축 전압을 바꾼 것은실제 운전에서는 항상 d축만 제어한다는 의미가 아니라,실습 설명을 단순화하기 위한 예시로 이해하시면 됩니다.추가 질문 사항 있으시면 회신 부탁드립니다.감사합니다!
- 좋아요수
- 0
- 댓글수
- 1
- 조회수
- 37
질문&답변
벅컨버터 출력전압
안녕하세요 제어쟁이입니다.벅컨버터로 12V를 만드는 이유는 게이트 드라이버 IC에 전원을 공급해주기 위해서 필요합니다!추가 문의사항 있으시면 댓글 부탁드립니다.감사합니다~!
- 좋아요수
- 0
- 댓글수
- 2
- 조회수
- 46
질문&답변
e_d_hat
안녕하세요. 제어쟁이입니다.먼저, 말씀해 주신 수식 오류를 확인했습니다. 정확한 지적 감사드립니다. 해당 오류에도 불구하고 제어에 큰 영향이 없었던 것은, 고정자 저항값이 작고 큰 부하가 인가되지 않아 성능 저하가 발생하지 않았기 때문입니다. 하지만 잘못된 수식으로 불편을 드려 죄송합니다. 지적해 주신 부분은 수정하여 재업로드하겠습니다. 감사합니다.
- 좋아요수
- 0
- 댓글수
- 2
- 조회수
- 40
질문&답변
벅컨버터 설계시 스위칭 주파수 설정
안녕하세요. 제어쟁이입니다.좋은 질문 감사합니다.ㅎㅎ스위칭 주파수 540kHz 근처 값은 임의로 정한 숫자라기보다, 인덕터 크기와 커패시터 용량, 전류/전압 리플, 효율, 발열을 함께 고려한 절충값입니다. 또한 PCB가 실제로 나오면 기생 성분 때문에 회로도 단계와 파형이 달라질 수 있어서, 보드 테스트 과정에서 주파수나 스너버, 커패시터 구성 등을 조정할 수 있습니다. 특히 EMI/EMC, 스위칭 링잉, 발열 조건을 만족시키기 위해 튜닝이 들어가는 경우가 많습니다. 다만 주파수를 바꾸면 인덕터/커패시터뿐 아니라 보상 회로까지 같이 다시 확인해야 합니다.
- 좋아요수
- 1
- 댓글수
- 2
- 조회수
- 61
질문&답변
실습 질문
(사진)안녕하세요. 제어쟁이입니다.먼저 모터와 파워가 없어도 사진과 같이 ST link와 흰색 USB를 컴퓨터에 연결하시면 보드에 3.3V 전원이 인가되서 기본적인 실습 가능하십니다. 제가 이번 달 내로 강의를 전체적으로 보완/업데이트 할 예정입니다. 불편을 드려 죄송합니다. https://open.kakao.com/o/gsUVs3Uh 오픈채팅방에 들어오셔서 질문하시면 좀 더 빠르게 답변이 가능합니다..! 추가 질문 있으시면 언제든지 문의주세요.감사합니다.
- 좋아요수
- 0
- 댓글수
- 2
- 조회수
- 46
질문&답변
강의 중에 스코프파형 보는 부분 혹은 DAC 출력 질문입니다.
안녕하세요. 제어쟁이입니다.먼저 보고 싶으신 변수를 DAC_FloatToCode(변수/ 최대 값)에 넣으시면 됩니다. 예를들어 현재 아래의 CH1같은 경우는 Theta_est 변수를 DAC로 보는 것이고 실제로는 Theta_est의 최대 값이 6.28까지만 나오지만 마진을 둬서 7.0까지로 설정한 경우입니다.(사진) 교육용 보드의 DAC 측정 포인트는 아래를 참고하셔서 측정하시면 됩니다. (사진)추가 질문 있으시면 댓글 부탁드립니다.감사합니다~!
- 좋아요수
- 0
- 댓글수
- 2
- 조회수
- 39
블로그
전체 12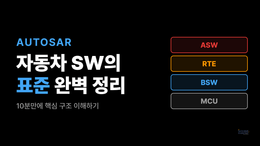
2026. 03. 21.
0
자동차 SW 표준 AUTOSAR, 핵심만 정리했습니다
자동차 SW 표준 AUTOSAR, 핵심만 정리했습니다 자동차 한 대에 ECU가 100개 이상 들어간다는 사실, 알고 계셨나요? 엔진 제어, 변속기, 브레이크, ADAS까지 — 현대의 자동차는 사실상 100개의 독립적인 임베디드 시스템이 네트워크로 연결된 거대한 복합체입니다.공급사가 바뀌면 전부 다시?문제는 여기서 시작됩니다. OEM이 인버터를 만들 공급사를 선정하면, 그 공급사의 하드웨어와 소프트웨어 아키텍처에 맞춰 개발해야 합니다. 그런데 공급사가 바뀌면? MCU가 단종되면? 차종이 바뀌면? 매번 소프트웨어를 처음부터 다시 작성해야 했습니다.이 비효율을 해결하기 위해 2003년, BMW·보쉬·컨티넨탈·다임러 등 경쟁사들이 한자리에 모여 만든 표준이 바로 AUTOSAR입니다.AUTOSAR의 핵심 — 추상화와 레이어 구조AUTOSAR의 핵심 아이디어는 단 한 단어, 추상화입니다. 소프트웨어와 하드웨어 사이에 추상화 계층을 두어, MCU가 바뀌어도 애플리케이션 코드를 한 줄도 수정할 필요가 없게 만드는 것입니다.이를 위해 AUTOSAR는 소프트웨어를 4개의 레이어로 나눕니다. 맨 아래 MCU(하드웨어), 그 위에 BSW(기본 소프트웨어), 중간에 RTE(실행 환경), 맨 위에 ASW(애플리케이션)가 올라갑니다. BSW는 다시 MCAL, ECU Abstraction, Service Layer로 세분화되어 하드웨어의 차이를 흡수합니다.SWC 모듈화와 개발 워크플로우애플리케이션은 SWC(Software Component) 단위로 개발합니다. 레고 블록처럼 모터 제어, 배터리 관리, 고장 진단 등 기능별로 모듈화하고, 표준화된 포트와 인터페이스로 연결합니다. 한번 검증된 SWC는 다른 차종에서도 그대로 재사용할 수 있습니다.실제 개발은 설계 → ARXML 설정 → 코드 생성 → 통합의 4단계로 진행됩니다. DaVinci, EB tresos 같은 전문 도구로 설계하면 BSW와 RTE 코드가 자동 생성되어, 개발자는 애플리케이션 로직에만 집중할 수 있습니다.왜 AUTOSAR인가?AUTOSAR를 도입하면 세 가지 핵심 가치를 얻습니다. 이식성 — MCU가 바뀌어도 BSW만 교체하면 되므로 재개발 비용이 획기적으로 줄어듭니다. 재사용성 — 검증된 SWC를 여러 차종에 그대로 적용할 수 있습니다. 표준화 — 전 세계 300개 이상의 기업이 같은 아키텍처, 같은 인터페이스를 사용하므로 어디서든 통하는 역량이 됩니다.물론 모든 프로젝트에서 100% 의무는 아닙니다. 하지만 전기차와 자율주행 시대로 가면서 소프트웨어 복잡도가 급격히 증가하고 있고, AUTOSAR 채택 비율은 계속 늘어나고 있습니다. 자동차 SW 개발에 관심이 있다면, 알아두면 확실한 무기가 될 것입니다.영상으로 더 자세히 보기: https://youtu.be/6g2ifSU69wQ?si=9Jpf5N2E0oopYqsx
임베디드 · IoT
・
AUTOSAR
・
자동차소프트웨어
・
임베디드
・
전기전자
・
모터제어
・
자동차sw
2025. 10. 07.
0
임베디드 SW 분야 정리!
임베디드 SW 분야안녕하세요, 제어쟁이입니다. 전공 3~4학년이 읽어도 이해될 수 있도록, 임베디드 SW의 대표 영역을 줄글로 정리했습니다. 같은 임베디드 SW라도 하는 일이 꽤 다릅니다. 인버터/컨버터와 같은 HW를 제어하기위한 SW, BSW/드라이버는 하드웨어를 소프트웨어로 끌어올리며, RTOS는 여러 일을 시간 안에 정리하고, 리눅스는 시스템 전체를 부팅부터 업데이트까지 관리합니다.관심 있는 분야를 하나 정해서 작은 프로젝트부터 꾸준히 만들어보시길 권합니다. 기록을 남기면 본인이 성장하는 속도가 확실히 다릅니다.과장 없이, 현업에서 실제로 하는 일을 기준으로 적었습니다.1) 인버터/컨버터 제어 SW인버터/컨버터 제어 SW는 모터 구동과 전력 변환을 위한 제어 알고리즘을 MCU에 구현하는 일입니다. BLDC/PMSM을 6‑step이나 FOC로 구동하고, 전류·전압·속도 같은 피드백을 읽어 PI 같은 기본 제어기를 돌립니다. 샘플링 타이밍, PWM 데드타임, ADC 트리거, 인터럽트 우선순위처럼 시간 민감한 요소를 맞추는 게 핵심입니다. 과전류·과전압·과열 보호와 같은 안전 로직을 같이 넣고, 기동 시퀀스나 센서리스 보조 알고리즘을 다루는 경우도 많습니다. 오실로스코프와 전류 프로브로 파형을 확인하고, 로그를 보고 튜닝하는 일이 잦습니다. 기본적으로 전력전자 개념, 모터 제어 수학(d‑q 변환, 파크/클라크), 고정소수점 연산, 필터 설계가 밑바탕이 됩니다.2) BSW(Basic Software)BSW는 보드가 켜졌을 때 가장 먼저 실행되는 초기화 코드부터 각종 주변장치 드라이버까지, 하드웨어를 SW에서 사용할 수 있게 만드는 층입니다. 클럭/전원/리셋 설정, GPIO, 타이머, UART·SPI·I2C·CAN, ADC/DMA, WDT 등을 레지스터 수준에서 설정하고 검증합니다. 부트 시퀀스와 인터럽트 벡터, 링커 스크립트로 메모리 배치를 잡는 것도 포함됩니다. AUTOSAR 환경이라면 MCAL 구성과 같은 표준화된 레이어 작업을 합니다. 데이터시트와 레퍼런스 매뉴얼을 정확히 읽고, 디버거(J‑Link, ST‑Link)로 레지스터 상태를 확인하면서 문제를 좁혀가는 능력이 중요합니다. 코드 자체보다 타이밍과 자원 제약을 맞추는 일이 더 어렵게 느껴질 수 있습니다.3) RTOS(실시간 운영체제)RTOS는 여러 작업을 일정 시간 안에 안정적으로 처리하기 위한 운영체제입니다. 센서 읽기, 통신 송신, 로깅처럼 주기가 다른 일을 태스크로 나누고 우선순위를 정해서 스케줄러가 돌게 합니다. 큐·세마포어·뮤텍스로 태스크 간 데이터를 교환하고 동기화합니다. ISR에서 무엇을 하고 무엇을 하지 말아야 하는지 구분하고, 블로킹 호출로 인해 우선순위 역전이나 데드락이 생기지 않게 구조를 잡아야 합니다. 실행시간 측정과 스택 사용량 모니터링으로 오버런을 찾는 것도 기본 업무입니다. FreeRTOS나 Zephyr 같은 RTOS를 쓰지만, 핵심은 어떤 작업을 어떤 주기로 돌리고, 실패했을 때 어떻게 복구할지를 명확히 정의하는 데 있습니다.4) 임베디드 리눅스임베디드 리눅스는 부트로더(U‑Boot), 커널, 디바이스 트리, 루트파일시스템을 구성해서 제품이 부팅되고 동작하도록 만드는 영역입니다. 하드웨어를 커널이 인식하도록 디바이스 트리를 작성하고, 필요한 커널 옵션을 켭니다. 사용자 공간에서는 데몬이나 서비스 프로그램을 만들어 센서 데이터를 수집하거나 네트워크 통신을 처리합니다. 부팅 시간을 줄이기 위해 불필요한 모듈을 빼고, 서비스 시작 순서를 조정하며, 전력 소비를 줄이기 위해 클록과 전원 관리를 설정합니다. OTA 업데이트와 롤백 같은 배포 방법을 설계하는 일도 포함됩니다. Yocto/Buildroot 같은 빌드 시스템을 쓰지만, 목표는 간단합니다. 필요한 기능만 담긴 이미지로 안정적으로 부팅하고, 현장에서 문제를 재현·수정할 수 있는 구조를 갖추는 것입니다.5) 디바이스 드라이버디바이스 드라이버는 센서, 액추에이터, 통신 모듈을 운영체제나 애플리케이션이 사용할 수 있게 추상화하는 코드입니다. 리눅스에서는 커널 모듈 형태로 작성해 /dev나 sysfs를 통해 접근시키고, RTOS나 베어메탈에서는 HAL 위에 드라이버 레이어를 만들어 API를 제공합니다. 인터럽트로 이벤트를 받고, DMA나 링버퍼로 데이터를 손실 없이 흘려보내며, 에러가 났을 때 재시도나 리셋을 어떻게 할지까지 포함합니다. I2C/SPI/UART/CAN 같은 버스 특성과 타이밍을 이해해야 하고, 로직애널라이저나 오실로스코프로 실제 신호를 확인할 줄 알아야 합니다. 드라이버의 품질은 성능뿐 아니라 예외 상황에서 얼마나 안전하게 복구되는지로 평가되는 경우가 많습니다.
임베디드 · IoT
・
임베디드
・
임베디드SW
・
전기전자
2025. 10. 07.
0
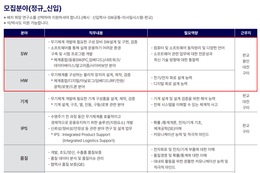
LG전자, LIG넥스원 채용공고 분석
안녕하세요 제어쟁이입니다. LG전자와 LIG넥스원의 신입 채용공고를 분석하여 카페에 정리했습니다.이번 글에서는 전기전자 중심 직무(하드웨어, 제어, 전력전자, 임베디드 등)를 집중적으로 다루었으며, 실제 업무 흐름과 준비 포인트를 구체적으로 설명했습니다. 특히 LIG넥스원은 미사일/해양 분야를 중심으로 구동제어·전력전자·임베디드HW 직무를 분석했고, LG전자는 생활가전의 전장·회로·모터 구동 직무를 중심으로 해석했습니다. 두 기업 모두 전동킥보드 개발 강의에서 배운 인버터/BLDC 제어·보호·시험 경험을 포트폴리오로 연결하는 방법도 함께 정리했습니다. 자세한 내용은 네이버 카페 ‘인사이드 임베디드’에서 확인하실 수 있습니다.카페 링크: https://cafe.naver.com/f-e/cafes/31273003/menus/25?viewType=L
임베디드 · IoT
・
전기전자
・
채용공고
・
LG전자
・
LIG넥스원
・
임베디드
2025. 08. 24.
2
모터제어 관련 3가지 필수 서적 추천!
안녕하세요 제어쟁이입니다. 오늘은 모터제어에 관심이 있고, 입문 하려는 분들께 전공서적을 추천드리려고 합니다.아마 현업에 계신분들은 다 한번씩은 무조건 읽어 보셨을거라 생각합니다.1.전기기계 - 정승기첫번째로는 모터 공부 입문으로 읽기에 정말 좋은 정승기 교수님께서 집필하신 "진기기계"라는 서적입니다. 자기장,코일, 변압기에 대한 내용부터 유도기, 동기전동기까지 넓은 범위의 내용이 담겨져있습니다. 개인적으로 제가 느낀 이 책의 정말 좋은 이유는 읽기 쉽다입니다. 읽기 쉽다는게 내용이 깊지 않다는게 아니라 어려운 내용들을 정말 이해하기 쉽게 설명 되어 있습니다. 예전에 대학원 후배들이 입학하면 모터제어를 알기 위해서 모터 공부를 할 때 꼭 추천해준 책입니다. 2. 모터제어 - 김상훈두번째로는 아마 모터제어 책으로는 대한민국에서 제일 많이 판매되었을거라 생각되는 김상훈 교수님이 집필하신 "모터 제어" 입니다. 제 기억으로는 학부 3학년? 그 쯤에 처음 수업때 읽었던 것 같고, 대학원 시절부터 현재까지 이 책으로 정말 많이 공부를 한 것 같습니다. DC 모터, BLDC, 유도기, 동기전동기까지 제어하는 방법을 담고 있습니다. 무조건 구매하셔서 공부해보시길 바랍니다. 3. 전기기기 제어론 - 설승기마지막으로는 대한민국 모터제어 전공자면 모두가 아는 설승기 교수님이 집필 하신 "전기기기 제어론"입니다. 이 책에서는 좀더 고급 제어에 대해서 다루고 있습니다. 따라서 처음부터 이 책으로 공부하시는 건 조금 어려울 수도 있습니다. 우선 두번째로 추천 드렸던 김상훈 교수님의 모터제어 책을 확실히 공부하시고 넘어가시길 추천드립니다. 이번 글에서는 모터제어에 관심 있으신 분들을 위해서 3가지 책을 소개드렸습니다. 공학은 철저한 이론을 바탕으로 실제 동작하는 제품을 만들어내는 학문입니다. 단순히 이론만 안다고 어디가서 대접해주지 않습니다. 또한 부족한 이론으로는 제대로된 제품을 만들 수 가 없습니다. 이론 공부를 정말 철저히 하시고, 꼭 본인만의 프로젝트를 진행해보시길 바랍니다. 현재 인프런에서 이론과 실제 프로젝트를 모두 경험할 수 있는 강의를 진행하고 있습니다. 관심 있으신 분들은 아래 링크를 확인 해보시길 바랍니다. 감사합니다.https://blog.naver.com/sw_engineer-/223933725136
임베디드 · IoT
・
임베디드
・
모터제어
・
전기공학과
・
전자공학과
・
전공서적
・
책추천
2025. 08. 15.
1
유튜브 업로드! MCU 데이터시트 5가지 실무 꿀팁!
안녕하세요, 인사이드 임베디드의 제어쟁이입니다.오랜만에 유튜브에 임베디드 개발자분들에게 도움이 될만한 영상을 업로드 하였습니다.MCU 데이터시트를 활용하는 5가지 방법에 대해서 정리하였습니다.꼭 한번씩 시청해보시길 바랍니다.감사합니다. 유튜브 링크 :https://youtu.be/0eYhwk6_8AU
임베디드 · IoT
・
임베디드
・
임베디드교육
・
MCU
・
STM32
・
데이터시트

2025. 08. 14.
2
MCU 데이터시트 읽는 5가지 방법 – 신입 임베디드 개발자 필독
안녕하세요 인사이드 임베디드의 제어쟁이입니다.“데이터시트? 스펙 적어놓은 두꺼운 PDF 아닌가요?”취준생·대학생분들에게 가장 많이 듣는 질문입니다. 결론부터 말씀드리면, MCU 데이터시트는 펌웨어와 회로, 디버깅까지 아우르는 ‘개발의 근거 문서’입니다.같은 칩을 써도 누군가는 하루만에 기능 구현을 하고, 누군가는 며칠을 헤매는 차이는 결국 문서를 어떻게 해석하느냐에서 갈립니다. 오늘은 신입이 데이터를 빠르게 골라 읽고 바로 실무에 꽂아 넣는 방법을 단계별로 안내드리겠습니다. 중간중간 AI를 공부 파트너로 붙여 효율을 2배로 끌어올리는 요령도 함께 담았습니다.첫째, 목차를 파악하는 습관부터 들이세요.데이터시트를 처음부터 정독하려 들면 500페이지에서 지칩니다. 신입에게 필요한 건 “어디에 무엇이 있는지”를 3분 안에 잡아내는 지도 그리기입니다. 저는 먼저 목차를 스캔하며 표시를 합니다. 핀 설명과 전기적 특성, 클록/타이밍, 플래시 대기(Flash Latency), 그리고 제가 사용할 주변장치(ADC, 타이머, USART, SPI, I2C, CAN) 챕터의 페이지 번호를 노트에 적어둡니다. 이후 검색(CTRL+F)은 키워드와 함께 페이지 범위를 지정해 들어가면 속도가 훨씬 빨라집니다.STM32 레퍼런스 메뉴얼둘째, 핀맵(Pinout)과 대체기능(Alternate Function)을 회로 전에 확정해야 합니다.UART를 두 개 쓰고 SPI도 써야 하는데 모두 같은 포트로 겹치면 곧바로 막힙니다. 데이터시트의 핀 기능 표에서 각 핀의 기본 모드, 대체기능, 아날로그/디지털 겸용 여부를 보고, 필요한 기능 조합이 실제 핀 배치로 가능한지 먼저 검토하세요. 이때 포트 스피드, 풀업/풀다운, 오픈드레인 가능 여부도 같이 확인하면 좋습니다.툴이 제공하는 핀 설정 툴만 믿지 말고, 최종 근거는 데이터시트라는 원칙을 잊지 마세요. 핀 충돌을 한 번 사전에 제거하면, 일정 지연을 방지할 수 있습니다.핀맵 확인셋째, 전기적 특성(Electrical Characteristics)을 반드시 확인해야합니다..VDD 동작 범위, I/O 허용 전압, 입력 임계치(VOH/VOL, VIH/VIL), 단일 핀과 포트 그룹의 최대 소싱/싱킹 전류, 누설 전류, ESD 등급, 온도 범위… 이 표들을 무시하면 디버깅은 끝없는 미궁이 됩니다. LED를 여러 개 물렸는데 한 포트에 합산 전류 제한이 걸려 밝기가 들쭉날쭉하거나, 5V 레벨 신호를 3.3V MCU에 직결해 미세하게 망가뜨리는 일은 너무 흔합니다. 또한 저전력 모드를 쓸 계획이라면 각 모드의 소비전류, 웨이크업 소스의 제약사항, LDO/SMPS 사용 시 안정성 조건을 꼭 체크하세요. 경계를 알수록 설계의 자유도가 커집니다.핀 절대정격넷째, 클록 트리와 타이밍을 이해하면 펌웨어의 절반은 먹고 들어갑니다.HSI/HSE, PLL 설정을 통해 시스템 클록이 어떻게 분배되고, 그 분주가 타이머, ADC 샘플링, 통신 보트레이트에 어떤 상관을 가지는지 그림으로 연결해 보세요. 예를 들어 PWM 해상도를 올리려면 타이머 클록과 ARR, PSC의 조합을 수치로 계산해야 하고, ADC는 샘플링 시간과 변환 시간이 클록에 묶여 있습니다. 데이터시트와 레퍼런스 매뉴얼의 클록-주변장치-타이밍 이해하면, “왜 여기서 이 속도가 안 나오는지”를 수식으로 설명하고 바로 해결할 수 있습니다.다섯째, 레지스터 이해는 필수적입니다.각 레지스터의 주소, 초기값(reset value), R/W 속성, W1C(Write 1 to Clear) 같은 특수 동작, Reserved 비트는 반드시 0으로 유지해야 한다는 경고까지 꼼꼼히 봐야 합니다. 초보가 가장 많이 하는 실수는 데이터시트에서 한 비트만 보고 나머지 상호의존 비트를 놓치는 것, 그리고 Enable을 먼저 올려놓고 설정을 바꿔 글리치를 만드는 것입니다. 저는 초기화 루틴을 작성할 때, 데이터시트의 표를 그대로 주석으로 옮겨 코드 옆에 두고, 설정-검증-활성화 순서로 검토합니다. HAL이든 LL이든, 결국 레지스터 레벨 이해가 빠르면 원인 지점으로 곧장 들어가 시간을 압축할 수 있습니다.여기까지가 문서를 ‘빠르게, 정확히’ 읽기 위한 구조이고, 이제 AI로 학습 효율을 끌어올리는 방법을 말씀드릴게요.첫째, 데이터시트 PDF를 바탕으로 개인 요약본을 만듭니다. LLM에게 “핀 기능 표에서 UART/SPI/I2C 가능한 핀만 추출해 표를 만들어줘”라고 프롬프트하면 초안을 즉시 얻을 수 있습니다. 다만 AI는 환각이 있을 수 있으니, 반드시 페이지 번호와 원문 문구를 근거로 다시 대조 하세요. (그래야 실력도 상승합니다.)둘째, 디버깅에 적극 활용하세요. 오실로스코프 캡처와 에러 현상을 텍스트로 설명해 “가능한 원인 5가지와 확인 절차”를 받아 체크리스트로 쓰면, 사고가 구조화됩니다. 이 모든 과정에서 최종 판단은 항상 데이터시트·레퍼런스 매뉴얼이 하며, AI는 속도를 올려주는 보조라는 점을 잊지 않는 것이 중요합니다.아직 초보자 분들에게는 사실 오늘 제가 작성한 글에 너무나도 많은 기술 용어들이 혼재하여, 이해하기 쉽지 않으실 수도 있습니다. 하지만 걱정하지 않으셔도 됩니다. 처음엔 모든 내용을 완벽히 이해하는 것이 아니라, 용어를 익히고 흐름을 잡는 것만으로도 충분합니다. 몇 번이고 데이터시트를 펼쳐보고, 하나씩 찾아가며 읽다 보면 어느 순간 익숙해져 있는 자신을 발견하게 될 겁니다.
임베디드 · IoT
・
임베디드
・
MCU
・
데이터시트
・
임베디드개발자
2025. 08. 13.
1
컴퓨터공학 전공자, 임베디드 개발 진입이 쉬운 5가지 이유
안녕하세요 인사이드 임베디드의 제어쟁이입니다.“임베디드 개발은 전자공학 전공자만 가능한 거 아닌가요?”많은 취준생과 대학생이 이렇게 묻습니다.하지만 결론부터 말씀드리면, 컴퓨터공학 전공자도 임베디드 개발 분야에서 충분히 경쟁력을 가질 수 있습니다.오히려 소프트웨어 중심의 배경 지식 덕분에, 초기 적응과 프로젝트 수행 속도가 더 빠를 수 있습니다.이 글에서는 컴퓨터공학 임베디드 개발이 유리한 이유 5가지를 구체적으로 살펴보겠습니다.1. 임베디드 개발의 핵심은 ‘코드’다임베디드 시스템은 하드웨어와 소프트웨어가 긴밀하게 결합된 분야입니다.하지만 실제 제품의 동작을 제어하고 최적화하는 핵심 요소는 펌웨어, 제어 로직, 통신 프로토콜 같은 소프트웨어입니다.컴퓨터공학 전공자는 이미 학부 시절부터 C언어, 자료구조, 알고리즘, 운영체제를 다루기 때문에, MCU 프로그래밍 같은 임베디드 펌웨어 개발에 빠르게 적응할 수 있습니다.예를 들어, 단순히 LED를 켜는 코드도 하드웨어 입출력 포트 제어와 메모리 매핑 개념을 이해해야 하는데, 이런 로직 구조를 익히는 데 컴퓨터공학 전공자는 강점을 갖습니다.2. 알고리즘 설계 능력이 경쟁력임베디드 개발은 제한된 자원(메모리, CPU 속도, 전력) 환경에서 최적화된 동작을 구현하는 것이 핵심입니다.예를 들어, 모터 제어 알고리즘을 작성할 때 속도 변화와 전류 사용량을 동시에 최소화해야 할 수 있습니다.또한 센서 데이터 처리 과정에서는 잡음을 제거하고 정확한 값을 산출하는 필터링 알고리즘이 필요합니다.컴퓨터공학 전공자는 시간 복잡도와 공간 복잡도 개념을 활용해, 처리 속도와 메모리 사용량 모두 효율적인 코드를 설계할 수 있습니다.이는 실시간 운영체제(RTOS) 환경이나 멀티태스킹 구조에서 특히 중요한 능력입니다.3. 문제 해결과 디버깅 속도가 빠르다임베디드 시스템에서는 비동기 통신 오류, 인터럽트 충돌, 메모리 누수, 타이밍 지연과 같은 문제가 빈번하게 발생합니다.이때 필요한 것은 단순한 코딩 스킬이 아니라, 문제의 원인을 체계적으로 분석하고 재현하는 능력입니다. 컴퓨터공학 전공자는 소프트웨어 개발 과정에서 이미 다양한 버그와 오류를 해결해 본 경험이 많습니다.JTAG, 시리얼 모니터링, 로직 애널라이저 같은 디버깅 도구를 사용해 문제를 추적하고, 코드와 하드웨어 동작의 연관성을 분석하는 데 능숙합니다.이러한 역량은 개발 일정 단축과 품질 개선에 큰 기여를 합니다.4. 하드웨어 기초는 노력으로 극복 가능하다많은 컴퓨터공학 전공자가 임베디드 개발 진입 시 가장 크게 걱정하는 부분이 하드웨어 지식 부족입니다.실제로 전원 설계, 입출력 회로, 센서 연결, 노이즈 대책 등은 임베디드 개발에서 필수적으로 다뤄야 할 부분입니다.하지만 중요한 것은 “쉽게 배운다”가 아니라, 꾸준히 학습하고 반복 실습해야 한다는 점입니다.하드웨어는 소프트웨어처럼 코드만으로 결과가 바로 보이지 않고, 전압·전류·신호 파형 등 물리적 특성을 이해해야 합니다.예를 들어, I2C 통신에서 데이터가 불안정하게 들어오는 경우, 회로 납땜 상태나 풀업 저항 값을 직접 측정하고 수정해야 할 수 있습니다.따라서 컴퓨터공학 전공자가 임베디드 개발자가 되려면, 이론과 실습을 병행하면서 전자 기초를 차근차근 쌓는 노력이 필수입니다.이 과정을 거치면 하드웨어 제약을 이해하는 진정한 ‘풀스택’ 임베디드 개발자로 성장할 수 있습니다.⸻5. 기업이 선호하는 융합형 인재로 성장기업들은 하드웨어 이해도를 갖춘 임베디드 개발자를 강하게 선호합니다.제품 개발 과정에서 하드웨어 엔지니어와의 원활한 협업이 가능하고, 하드웨어 제약을 고려한 최적화된 펌웨어를 작성할 수 있기 때문입니다.컴퓨터공학 전공자가 임베디드 기술을 익히면, 프로젝트 초기에 회로 설계 검토 단계부터 참여해 문제를 예방하고, 개발 속도를 높이는 핵심 인재가 될 수 있습니다.특히 스타트업이나 소규모 개발팀에서는 이러한 융합형 인재가 프로젝트 성패를 좌우할 정도로 중요한 역할을 합니다.
임베디드 · IoT
・
임베디드
・
컴퓨터공학과
・
전기전자
2025. 06. 30.
1
임베디드 개발자에게 AI란?
안녕하세요. 제어쟁이입니다.요즘 AI 정말 발전속도가 엄청난 것 같습니다.저도 코딩부터 회로 검증 아이디어까지 틈만 나면 활용하고 있습니다. 덕분에 ‘속도’는 확실히 빨라졌는데, 동시에 “임베디드 개발자는 앞으로 어떻게 될까?” 에 대해서 저의 생각을 정리해보았습니다.1. 임베디드 개발자에게 AI가 주는 실질적 이득• 반복 업무 아웃소싱레지스터 비트 계산, 데이터시트 요약, 테스트 스크립트 작성처럼 손이 많이 가지만 창의성은 적은 작업은 AI를 활용.• 디버깅 힌트 제공오동작하는 코드 분석, CAN 프레임 이상 현상 분석 등도 초안을 받아두면 문제 접근 속도가 확연히 빨라집니다.2. 그럼 일자리는 괜찮을까?• 완전 대체까지는 시간 필요임베디드는 소프트웨어-하드웨어-인증 절차가 한 세트입니다. 보드에 전원 넣고 오실로스코프로 파형 찍어야 ‘동작 확인’이 가능하죠. AI가 지금 당장 이런 현장 작업까지 대신하기는 어렵습니다.• 자동차·방산처럼 프로세스가 엄격한 분야ISO 26262 규격은 문서화와 검증이 필수입니다. AI가 코드를 짜 줘도 최종 서명은 사람이 해야 하니, 개발자 자리는 남습니다.• 순수 웹·앱보다 ‘대체 가능성 ↓’코드만으로 결과가 나오는 영역은 이미 AI가 빠르게 침투 중이지만, 물리적 제약이 큰 임베디드는 상대적으로 안전지대입니다.3. AI를 잘 활용하는 방법질문을 구체적으로“PWM 코드 만들어 줘”보다 “STM32F767 TIM1 CH1을 20 kHz, Dead-Time 1 µs로 설정해 줘”처럼 요구 조건을 명확하게하여 질문 해야합니다.검증은 직접!답이 돌아오면 데이터시트, 레퍼런스 매뉴얼, 오실로스코프 파형으로 반드시 교차 확인합니다.질문을 잘하자사실 결국 회로이론, 전력전자, 제어 이론, 신호 처리, 마이크로컨트롤러와 같은 이론이 탄탄할수록 좋은 질문을 하게되고, 그에 맞는 좋은 답변을 얻을 확률이 높아지게 됩니다.4. 한줄 결론AI는 도구이자 든든한 A급 부사수라고 생각합니다. 하지만 아무리 A급 부사수라고 할지라도 실수는 할 수 있겠죠?실무에서 도움을 받는것은 좋으나 의존하면 절대 안됩니다.최종 의사결정과 현장 책임은 여전히 개발자의 몫입니다. 그러니 AI를 더 똑똑하게 활용할 수 있도록 내 실력부터 차근차근 쌓아 두는 것이 앞으로도 변하지 않을 생존 전략입니다.궁금한 점이 생기면 언제든 댓글로 남겨 주세요. 가능한 한 빠르게 답변드리겠습니다!감사합니다.
임베디드 · IoT
・
임베디드
・
AI
2025. 06. 22.
1
임베디드 개발자 학습 로드맵 완벽 정리! (전기,전자,로봇,컴공 필수 시청)
안녕하세요. 네이버 블로그 ‘인사이드 임베디드’를 운영하고 있는 제어쟁이입니다! 😊 이번 영상에서는 임베디드 개발자가 되기 위해 꼭 거쳐야 학습 로드맵을 정리해봤습니다. 단순한 과목 나열이 아닌, 실제 실무에서 어떻게 쓰이는지까지 담았으니 전자·전기·로봇·컴공 전공자 분들이라면 꼭 끝까지 시청해주세요! ✔ 어떤 하드웨어 과목을 어떤 순서로 공부해야 하는지 ✔ C언어와 MCU는 어떻게 연결되는지 ✔ 제어공학과 DSP가 왜 중요한지 ✔ 실험 장비와 기록 습관까지 왜 실력 차이를 만드는지 이 영상 하나로 임베디드 학습의 전체 흐름을 잡으실 수 있습니다. https://www.youtube.com/watch?v=G8AYOJh9SYM
임베디드 · IoT
・
임베디드
・
전자공학
・
전기공학
・
로드맵
2025. 06. 22.
2
대학원 진학 고민하시는 분들께!
안녕하세요 제어쟁이입니다.유튜브와 블로그를 운영하면서 학생 분들, 사회 초년생 분들로부터 많은 질문을 받았습니다.그중에서도 특히 대학원 진학을 고민하시는 분들이 많더라구요. 결론부터 말씀드리면, 대학원은 여건이 된다면 무조건 진학하시길 추천드립니다. 특히 석사 과정은 가성비가 매우 훌륭하고, 박사 과정은 석사를 해보면서 자연스럽게 결정할 수 있을 거예요. 정말 현실적으로, 대학원을 선택할 때 고려해야 할 가이드를 제시해드리겠습니다.1. 학교 네임밸류2. 산학 과제, 국책 과제를 많이 하는가?3. 희망 대학원 랩실 졸업생들의 진로하나씩 설명드릴게요.1. 학교 네임밸류사실 이건 대한민국, 아니 전 세계적으로도 어쩔 수 없는 부분입니다. 여러분이 면접관 또는 인사 담당자라면, 서울의 S대 출신과 처음 들어보는 대학원 랩실 출신 중 누구를 더 선호하시겠어요? 현실은 냉정합니다. 네임밸류는 여전히 강력한 무기입니다.2. 산학 과제, 국책 과제를 많이 하는가?랩실 홈페이지를 보면 어떤 회사들과 산학 과제 또는 국책 과제를 진행했는지 확인할 수 있습니다. 이러한 과제를 많이 한다는 건, 여러 기업과 함께 일할 기회가 많다는 뜻이고, 이는 취업에 매우 유리한 요소로 작용할 수 있습니다.3. 희망 대학원 랩실 졸업생들의 진로랩실 졸업생들이 어디에 취업했는지는 대부분 홈페이지에 공개되어 있습니다. 그리고 졸업 후에는 선배들이 근무하는 기업이나 유사한 곳에 연결될 가능성이 매우 높습니다. 취업이 목표라면 반드시 확인해야 할 부분이죠.위의 세 가지는 꼭 깊이 고민해보시길 바랍니다..! 궁금한 점이나 추가 질문이 있으시면 언제든지 편하게 문의주세요 :)
임베디드 · IoT
・
전기전자
・
전자공학
・
대학원
・
취업








