




리틀앤디언 빅앤디언 질문입니다.!!
281
작성한 질문수 8
안녕하세요 저번에 질문드렸었는데요~
stm은 리틀앤디언으로 저장해야된다고 하셨었는데
보다보니 너무 헷갈려서 질문드립니다~ㅎㅎ
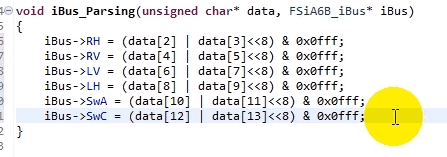
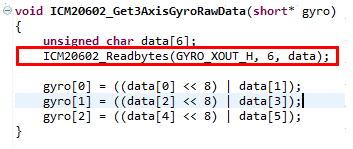
ibus와 ICM20602의 함수는 그냥 각각 1바이트 배열값을 2바이트 변수값에
높은 자리수에 맞게 쉬프트 시킨거 아닌가요?
리틀앤디언은 낮은자리 바이트가 낮은 주소에 오는걸로 아는데
여기에 리틀앤디언 저장을 한건가요?ㅜㅜ헷갈립니다.
답변 1
0
안녕하세요 또 질문주셨군요 ㅎㅎ
iBus 데이터는 리틀엔디언 순서로 받아지고, ICM20602는 빅엔디언 순서로 받아집니다.
이 둘간의 데이터 순서가 다르기 때문에 코드도 약간 다르죠.
비트연산 할때 배열의 인덱스도 유의해서 천천히 생각해보세요.
별로 어렵지 않습니다 :)
0
음~~그것은 이해했습니다만
저번에 말씀하신 리틀앤디언으로 저장해야된다는것이 무엇인지 궁금합니다.
ibus파싱이나 icm20602같은 경우에 모두 상위바이트가 상위주소값을 갖도록 (빅앤디언)저장이 되었는데
조금 혼선이 와서 질문드립니다.
이걸 배운후 freertos 및 can통신으로 전환가능할까요?
0
34
0
비행승인 문의드립니다
0
57
0
드론의 M4 모터가 느리게 작동합니다.
0
93
2
STM32CubeIDE 관련해서 질문이 있습니다.
0
112
2
while문 루프 속도
0
77
2
변수 선언
0
70
2
FS-i6를 꺼도 LED 토글되는 이유
0
83
2
Fs-i6 i-bus 수신 데이터 이상
0
137
3
3-4. UBX 위도 경도 정보 Terminal에서 깨짐 현상
0
110
2
3-4. LED 토글 안됨
0
59
1
3-1. M8N GPS 강의 통신 연결 관련 문의
0
93
1
2-3. LPS22HH 강의 수행값이 아두이노 IDE Plotter 및 Terminal에서 인식 안됨
0
95
2
6-4 SwC 2000
0
115
2
6-4 ESC Calibration
0
74
1
esc, 모터 교체
0
135
2
부저 소리가 안납니다.
0
148
2
비행 질문
0
77
1
7-5. offset
0
84
2
sysmem.c
0
88
2
전체 제어의 주기를 1KHz로 설정한 이유가 궁금합니다.
0
101
2
부품 구매 관련 문의
0
74
1
PID 게인 문제
0
97
3
3d telemetry cp210x 연결
0
130
2
8-1. 3DR Telemetry HAL_UART_Receive_IT(&huart1, &uart1_rx_data, 1); 관련 문의
0
84
2