전동킥보드로 배우는 임베디드 실전 프로젝트
제어쟁이

회로/PCB 설계, Stm32 펌웨어, BLDC 모터 제어를 한번에 배울 수 있는 강의입니다. 3상 인버터를 직접 설계하여 전동 킥보드 구동까지 시켜보는 강의입니다.
중급이상
임베디드, stm32, hardware





BLDC를 넘어, 모터 제어의 깊이를 더하고 싶을 때
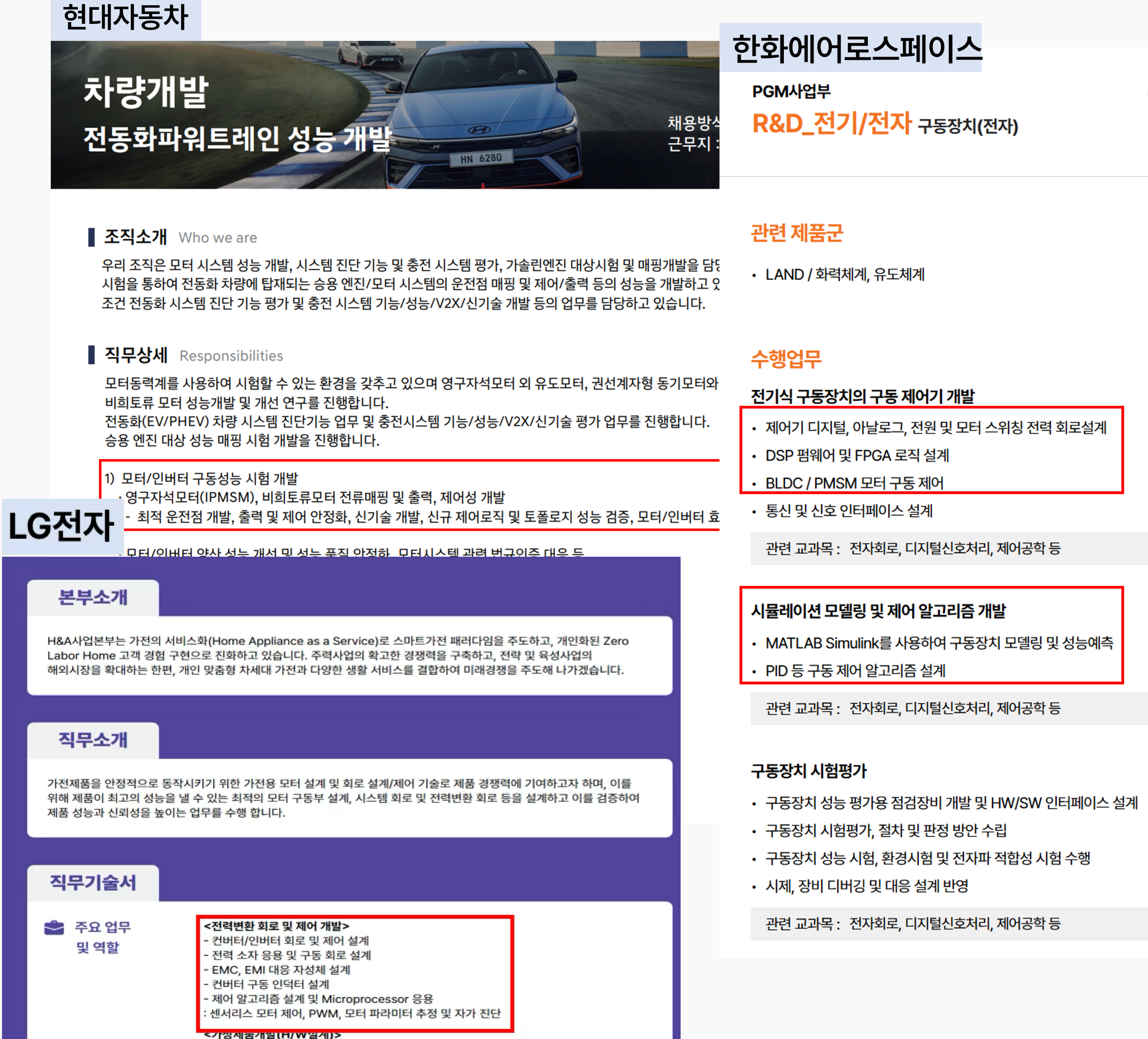
전기차/로봇 분야에 도전하고 싶지만, 핵심 기술이 없어서 고민될 때
PMSM 이론을 공부했지만, 막상 혼자 구현해보려니 막막함을 느낄 때


성능을 넘어 원가와 내구성까지 요구하는 현업에서, 센서리스 제어는 하드웨어 센서 없이 이 모든 가치를 구현하는 핵심 기술입니다. 이 기술의 이해와 구현 능력은, 여러분을 현업에서 차별화된 경쟁력을 갖춘 엔지니어로 만들어 줄 것입니다.

.



고효율로 주행거리를 연장하고, 정밀제어로 역동적인 가속 성능과 프리미엄 승차감을 구현합니다.

정밀제어로 소음과 진동을 최소화하고, 고효율로 에너지 소비효율 1등급 달성을 위한 필수 조건을 달성합니다.

고출력/고밀도로 기동성을 확보하고, 정밀제어로 안정적인 비행과 목표 명중률을 보장합니다.

정밀제어로 작업 성공률을 극대화하고, 고출력/소형화로 로봇의 생산성을 높입니다




진지하게 학교 교수님들보다 강의력 좋은듯..ㅋㅋ 그리고 실습까지 다루는건 진짜 최고네요. 역시 이번 강의도 최고입니다~~
전동킥보드 강의도 들었던 학생입니다. 한국에서는 임베디드, 모터제어 인강으로는 최고가 아닐까 생각이 되네요. 정말 큰 도움 받았습니다. 다른 강의도 많이 내주세요 감사합니다.
PMSM 벡터제어를 제대로 배우고 싶은 분들께 강력 추천하는 강의입니다! 무엇보다 이론적인 배경부터 시작해 Matlab을 활용한 정밀한 시뮬레이션, 그리고 STM32 기반의 실제 하드웨어 실습까지 모든 과정을 직접 경험해 볼 수 있어서 정말 유익했습니다. PMSM 실습까지 진행하는 강의는 국내에서 찾기 매우 힘든데 정말 유익한 강의입니다. 감사합니다.