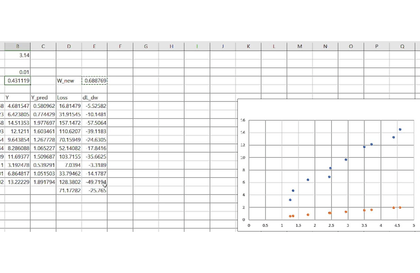
엑셀로 맛보는 딥러닝
멋진
₩5,500
입문 / Excel, 딥러닝, VBA
4.8
(20)
500+
엑셀로 딥러닝의 원리를 눈으로 보면서 익혀보겠습니다.
입문
Excel, 딥러닝, VBA

이 강의가 특별한 이유: 핵심 장점 • 직관적인 시각화: Pygame 2D 시뮬레이션으로 알고리즘 동작을 실시간으로 직접 확인 • 실제 구현 경험: 이론을 넘어 직접 코딩하며 자율 주행 알고리즘 체득 • 핵심 알고리즘 마스터: 다익스트라, 퓨어 퍼슈트, ICP 등 필수 알고리즘 집중 학습 • 단계별 심화 학습: 기초부터 SLAM까지 체계적인 난이도 구성 • Lidar 기반 SLAM: 미지 환경에서의 맵 구축 및 위치 추정 실습






LG전자
임직원들도 이 강의를 듣고 있어요!
LG전자
임직원들도 이 강의를 듣고 있어요!
SLAM (Simultaneous Localization and Mapping)
ICP (Iterative Closest Point)
다익스트라 알고리즘 (Dijkstra Algorithm)
퓨어 퍼슈트 알고리즘 (Pure Pursuit Algorithm)
아커만 조향 모델 (Ackermann Steering Model)
학습 대상은
누구일까요?
자율 주행 분야에 처음 입문하는 초보자
AI/딥러닝 외 자율 주행의 핵심 원리를 배우고 싶은 분들
실습을 통해 깊이 있는 이해를 원하는 분들
선수 지식,
필요할까요?
Python 프로그래밍 기초
고등학교 수준의 기본적인 수학 + 행렬 연산
컴퓨터 과학 기초 (선택 사항)
1,676
명
수강생
48
개
수강평
10
개
답변
4.8
점
강의 평점
12
개
강의
안녕하세요
비전공자로 딥러닝을 열심히 공부하는 직장인입니다.
공부하면서 느낀 점들을 여러분들과 함께 공유하고 싶습니다
감사합니다.
전체
9개 ∙ (3시간 10분)
해당 강의에서 제공:
4. AD_2_맵 만들기
28:53
5. AD_3_최단경로 생성
16:41
6. AD_4_경로 추종하기
36:49
7. AD_5_Lidar 이해하기
26:39
8. AD_6_ICP 이해
25:21
9. AD_7_SLAM 기초 이해하기
18:46
전체
3개
지식공유자님의 다른 강의를 만나보세요!
같은 분야의 다른 강의를 만나보세요!
신규가입 25% 할인
₩16,500
25%
₩22,000



![[AICE] 파이썬으로 배우는 데이터 분석과 AI모델링강의 썸네일](https://cdn.inflearn.com/public/files/courses/340648/cover/01kg1qqxb50yahem3fa8znqr9p?w=420)

![[AICE] Basic 합격을 위한 맞춤 강의강의 썸네일](https://cdn.inflearn.com/public/files/courses/340280/cover/01kg1n8gst8sm6hwvag3bxccb9?w=420)