




해당 코드 부분이 이해가 안갑니다
257
작성한 질문수 4
책 150p 입니다. (5~6번)
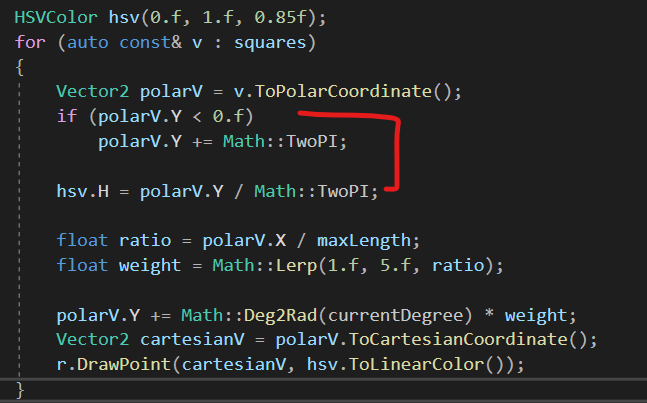
해설을 보면 극좌표계의 각은 [-π, π]범위를 가진다는데 이 부분부터 이해가 안갑니다.
(1) 원의 x축을 기준으로 윗 부분은 π, 아랫부분은 -π의 각을 가질 수 있어서 범위를 [-π, π]로 말씀하신 것인지 궁금합니다.
(2) [-π, π] 범위에서 [0, 2π]로 변경하기위해 2π를 더해준다고 설명이 되어있으나 왜 π -> 2π가 되기 위해 2π를 더해주는지 이해가 안갔습니다. 그리고 [0, 2π]로 변경하는 이유도 궁금합니다.
(바로 아래 정규화 부분 때문에 하신 것 같으나, 정확한 이해를 위해 여쭤보게 되었습니다)
나머지 부분은 이해가 되었는데 위 두 부분은 완벽한 이해가 되지 않아 찝찝한 마음에 질문을 남기게 되었습니다..! 만약 질문이 있다면 계속 인프런에 올리면 될까요 아니면 따로 질문방이 있을까요?
답변 1
0
예를 들어, -10도는 +350도와 동일하기 때문에 +2파이를 했다고 생각하시면 됩니다.
각이 양수인 경우에는 그대로 사용하면 되지요.
HSV 좌표계에서 0~1의 범위는 빨주노초파남보 색상 순환싸이클을 의미합니다. 그렇기에 2pi 범위를 가진 각의 값을 0~1로 정규화해주어야 하죠.
[내적] 강의노트 문의
0
65
2
선형성 강의 노트 문의
0
57
2
github 코드 질문 + 서적 내용 - Transform 계층구조 쪽
0
106
2
예제 13_4 {VM행렬을 사용하여 평면의 방정식을 로컬 좌표로 생성하기
0
92
2
투영 관련하여 정말 궁금한 점이 있어 질문 드립니다.
0
194
2
반지름이 r인 경우에 cos^2θ+sin^2θ = 1 검증
0
361
2
강의자료 가환환에 대해서 질문드립니다
0
182
2
카메라의 로컬 벡터 구하기
0
165
2
삼각함수 관련 질문입니다.
0
602
2
"섹션 1 - 선형성 13:14 " 함수와 사상의 차이에 대해 헷갈리는 부분이 있습니다!
0
270
1
언리얼 회전행렬 순서
0
615
2
연산 순서는 오른쪽에서 왼쪽??
0
183
1
3차원 회전 변환 오일러 각
0
521
1
1강 19:53 환의공리
0
285
1
로컬 <-> 월드 트랜스폼 변환 시 모델링 행렬을 바로 곱하지 않는 이유
0
300
1
아핀 결합과 평면
0
258
1
리뷰에 대한 답글 다신 것 중에 소스 코드 공유 가능할까요?
0
233
1
책 p145 질문
0
237
1
선형 독립
0
283
2
선형성 질문
0
278
1
벡터 공간
0
266
1
강의자료 질문
0
291
2
실습 실행 오류 질문
0
263
1
행벡터와 열벡터의 차이
0
1140
1