Xin chào, tôi là Je-eo-jaeng-i (Chuyên gia điều khiển).
Tôi là một kỹ sư đang làm việc thực tế, chuyên phát triển hệ thống điện hóa (động cơ·biến tần) tại một tập đoàn lớn.
Dựa trên kinh nghiệm trực tiếp đảm nhận từ mạch điện, PCB, firmware đến thuật toán điều khiển trong các dự án sản xuất hàng loạt, tôi đang vận hành kênh YouTube/Naver Blog "Inside Embedded" và tạo ra các nội dung đào tạo dành cho các nhà phát triển nhúng.
Tôi muốn chia sẻ những kiến thức thực tế được sử dụng tại hiện trường, những điều hiếm khi được đề cập trong sách vở hay giảng đường :)
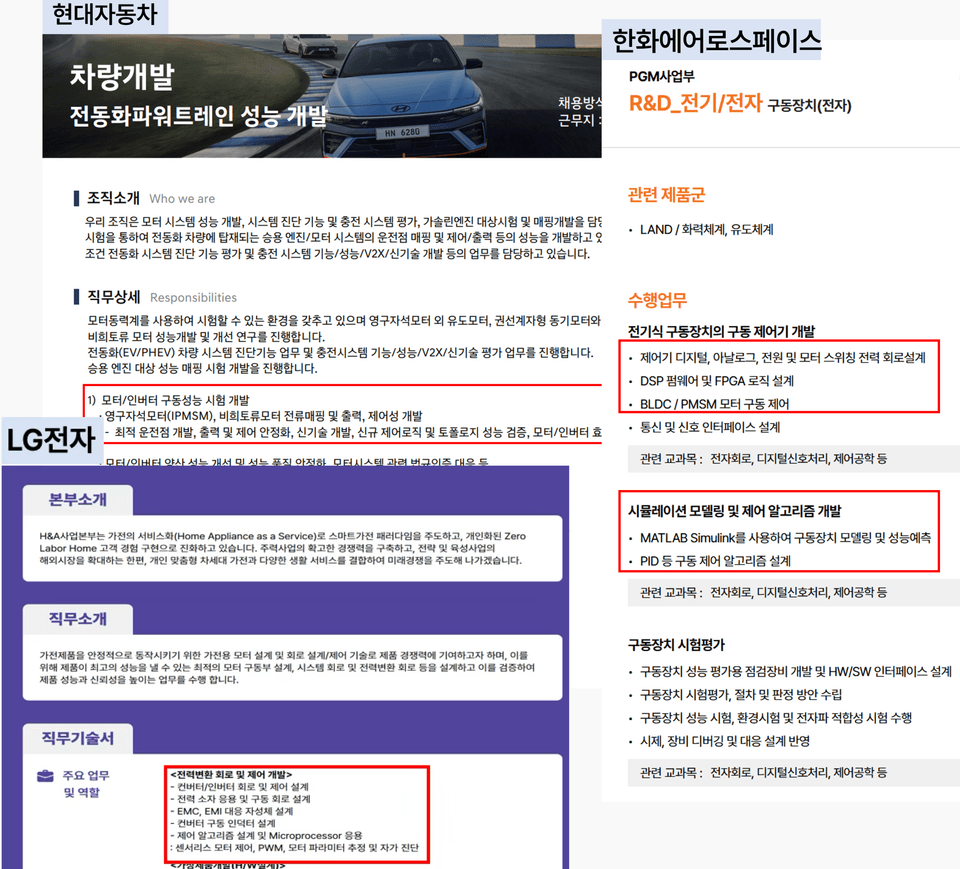
Hợp tác với các OEM ô tô toàn cầu
Phát triển phần cứng biến tần 3 pha (Mạch điện / PCB)
Phát triển thuật toán điều khiển BLDC · PMSM · WFSM (Động cơ đồng bộ kích từ dây quấn)
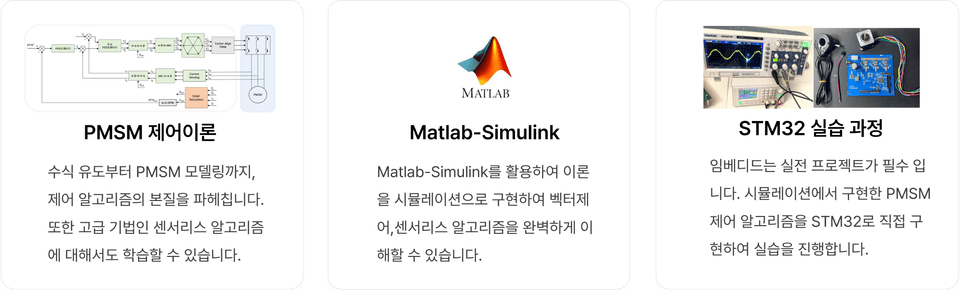
Toàn bộ quy trình phát triển / kiểm chứng hệ thống điện hóa (Electrification System)
Kinh nghiệm đánh giá dựa trên xe thực tế và thiết bị thử nghiệm (bench)
Café : https://cafe.naver.com/insideembedded?iframe_url=/MyCafeIntro.nhn%3Fclubid=31273003
Blog : https://blog.naver.com/sw_engineer-
Youtube : https://www.youtube.com/@Inside_Embedded
Phòng chat mở: https://open.kakao.com/o/gsUVs3Uh