電動キックボードで学ぶ組み込み実践プロジェクト
insid2embedded

回路/PCB設計、Stm32ファームウェア、BLDCモータ制御を一度に学べる講座です。 三相インバータを自ら設計し、電動キックボードを駆動させるところまでを実践する講座です。
中級以上
Embedded, stm32, hardware
BLDCを超えて、モーター制御の深みを加えたい時
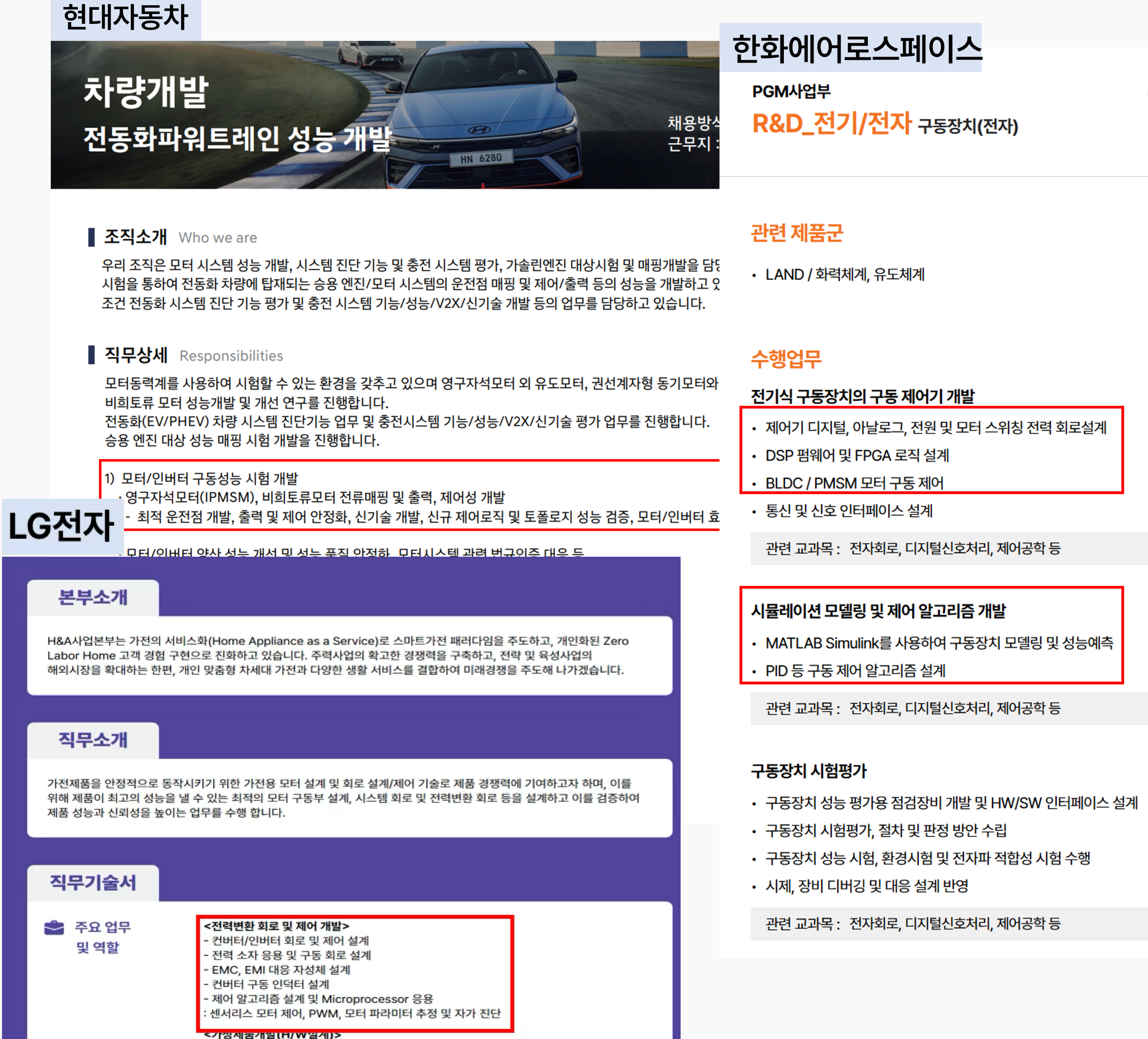
電気自動車やロボット分野に挑戦したいけれど、核心技術がなくて悩んでいるとき
PMSM理論を勉強したものの、いざ一人で実装しようとすると途方に暮れてしまう時


性能を超えてコストや耐久性まで求められる現場において、センサレス制御はハードウェアセンサなしでこれらすべての価値を実現する核心技術です。この技術の理解と実装能力は、あなたを現場で差別化された競争力を備えたエンジニアへと成長させてくれるでしょう。

.



高効率で走行距離を延長し、精密制御でダイナミックな加速性能とプレミアムな乗り心地を実現します。

精密制御で騒音と振動を最小限に抑え、高効率でエネルギー消費効率1等級達成のための必須条件を達成します。

高出力/高密度で機動性を確保し、精密制御で安定した飛行と目標命中率を保証します。

精密制御で作業成功率を最大化し、高出力・小型化でロボットの生産性を高めます。




正直、大学の教授たちより教え方が上手い気がする(笑)それに実習までカバーしているのは本当に最高ですね。やはり今回の講義も最高です~~
PMSMベクトル制御を本格的に学びたい方に強くおすすめする講義です!何より理論的な背景から始まり、Matlabを活用した精密なシミュレーション、そしてSTM32ベースの実際のハードウェア実習まで、すべての過程を直接経験することができて本当に有益でした。PMSMの実習まで行う講義は国内では非常に珍しいですが、本当にためになる講義です。ありがとうございました。
電動キックボードの講義も受講した学生です。 韓国では組み込み、モーター制御のオンライン講義として最高ではないかと思います。本当に大きな助けになりました。他の講義もたくさん出してください。ありがとうございます。