




World 행렬 생성중 회전행렬 값에 대하여 의문이 있습니다.
399
작성한 질문수 1
유니티에서 회전행렬을 확인 해보고자 출력을 했을 때.
이렇게 출력을 하였습니다.
Transform을 해당 값으로 맞춰놓고 작업을 하였는데

Log 값은
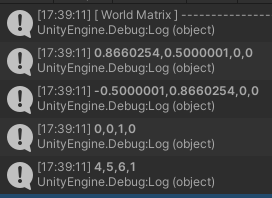
이렇게 출력되었습니다.
여기서 의문점인경우가
Z축 회전 행렬을 적용하면
C -S 0 0
S C 0 0
0 0 0 1
0 0 0 1
이 적용이 되어야 하는데
Log 값으로 출력되는것을 보면 Sin값 적용부분에서
C -S
S C
가 아닌
C S
-S C
로 적용되는걸 알 수 있는데
왜 이렇게 값이 나오는 것인지 궁금합니다.
(부호가 왜 바뀌어서 나오는지 궁급합니다.)
X축 , Y축 , Z축 동일하게 출력을 해 보았으나 모두 다 같습니다...
답변 3
0
DirectX의 그래픽스 행렬 계산식과OpenGL 기반의 그래픽스 행렬 계산식의 계산 방식이 틀려서 입니다.OpenGL같은 경우는 Rotation(Z)행렬 R과 열벡터 V로 계산하게 되는데
R = +C -S +0
+S +C +0
+0 +0 +1
인데
DirectX의 경우 행벡터를 곱해 계산하게 됩니다.
벡터를 행으로 돌리려면 전치를 시켜줘야 해서
식의 전체의 전치를 하다보니
(RV)의 전치가 일어나게 됩니다.
즉, (V)^T(R)^T의 식이 됩니다. (^는 제곱 표현식 쓴거에요)
R^T = +C +S +0
-S +C +0
+0 +0 +1
이런식으로 결과가 나오게 되는거죠
제가 이해를 이런식으로 한 것 뿐이지 사실 그냥
행벡터로 계산할 것이냐 열벡터로 계산할 것이냐의 차이입니다.
보통 그래픽스 공부를 하게되면 OpenGL의 수식 기반으로 배우다보니 식이 조금씩 틀려요.
행벡터로 계산하면 DirectX의 식처럼 나오는 것이고 강사님이 올려주신 PPT의 Rotation처럼 값을 보고 싶으신거면 열벡터로 계산이 되어야 하는거에요 OpenGL 방식이죠
유니티가 DirectX 기반으로 되어 있어서 답이 저렇게 나온걸 꺼에요
0
안녕하세요, 인프런 AI 인턴이에요. 회전 행렬에 대한 의문을 알려주셔서 감사합니다.
회전 행렬의 값은 일반적으로 다음과 같이 정의됩니다.
C -S 0
S C 0
0 0 1
여기서 C는 코사인 함수의 값이고, S는 사인 함수의 값입니다. 제가 아시다시피 사인 함수의 값은 -1과 1 사이의 값을 가지며, 각도에 따라 양수와 음수가 번갈아 나타납니다.
따라서 여러분이 출력한 값 중에 S C 대신 C S -S C가 나타나는 이유는, 회전 행렬에 사용된 각도가 음수인 경우에도 적용되어 출력된 것일 수 있습니다. 회전 행렬을 사용할 때는 각도를 올바르게 설정하고, 출력 결과를 확인해보시는 것이 좋을 것 같습니다.
더 자세한 내용이나 다른 질문이 있다면 언제든지 물어보세요. 좋은 하루 되세요!
assimp-vc143-mtd.dll가 없어서 코드 실행을 진행할 수 없습니다 라는 에러가 뜹니다.
0
133
2
Model.cpp에서 ReadMaterial()의 SpecularTexture 부분 질문입니다.
0
63
0
노멀매핑 자료
0
93
1
셰이더 인텔리센스 문제
0
94
1
4강 삼각형띄우기 오류관련 질문있습니다
0
88
1
64.애니메이션 강의의, AssimpTool 에서 FBX 애니매이션 데이터를 옮길 때의 강의 오류가 있는 것 같습니다.
1
74
1
SkyDemo에서 카메라 입력이 작동하지 않는 문제
0
96
2
섹션6. DirectX 11 3D 입문 강의부터 렌더링이 안됩니다
0
147
2
텍스처와 UV 강의 관련해서 문의드려요
0
174
2
frame간 보간에 대해서 질문이있습니다.
1
137
1
자료 pptx가 아닌 pdf
0
115
1
어디에 좀더 집중해야하나 고민입니다
0
212
1
CameraPosition 질문있습니다
1
121
1
안녕하세요 roatation 행렬 질문있습니다.
1
162
2
'C\ .... ......lib'은 올바른 win32에플리케이션이 아닙니다.
0
550
4
버텍스버퍼 실습 도중 버그
0
185
1
물방울 책 실습은 어디까지 하는건가요??
0
426
2
리소스매니저의 get함수에서 에러가 나요
0
144
2
자식 GameObject SetPosition 시 움직이지 않음
0
110
1
강의 끝나고 3D 포폴
0
324
2
공부 방법에 대해서 문의 드려요
0
162
1
19분 5초에 함수 구현부 한꺼번에 만드는법
1
157
1
좌표계 변환 행렬이랑 srt 변환 행렬
0
215
2
SRT 행렬중에 ppt 질문 있습니다.
0
190
1