HAL、CubeMX、TrueSTUDIOを活用したSTM32F4無料講座
ChrisP
無料
初級 / C, IoT, Dron
5.0
(60)
3,500+
高性能マイクロコントローラーであるSTM32Fシリーズを初めて触れる方が簡単に始められるよう、無料コンパイラのTrueSTUDIOおよびコード自動生成プログラムCubeMXのインストールから、チップ機能の概念説明、ソースコード作成(HALドライバー関数説明)、ハードウェア実装まで全ての過程を扱います。
初級
C, IoT, Dron
※ 本講義は22年9月から全面無料化されました。 STM32CubeIDEという無料のコンパイラを使用して、STM32F4の高性能自作ドローンのFCC飛行制御システムを最初から最後まで自分で開発する唯一の講義です。 ArduPilotやPixhawkなどのドローンオープンソースを使用せず、センサーインターフェイスからPID制御まですべて自分で実装するため、ドローン制御システムや組み込みシステムのすべての開発プロセスを経験して学習することができます。 専門外の初心者でも簡単に従えるように、授業ではすべてのソースコードとハードウェアの組み立て方法についてゆっくり説明します。 ゆっくり従うだけで、自分で開発したドローンで市販品よりも安定した飛行を体験することができます。
学習した受講者のレビュー
5.0
Taewan Sung
普段組み込み製品の開発に関心を持っていました。いくつかのC言語の本とYouTubeの例に従うことには限界があった車にインフロンドローン開発講座を聞くようになりました。 LEDの点灯からPID制御まで、一つ一つずつ追従しながら組み込み製品開発ノウハウを学ぶことができました。各種センサデータを受信、処理し、無線送受信装置と通信しながら、限られた時間内にドローン姿勢を調整するコーディング方法を知りました。入念な説明に従ってコーディングしたところ、ドローン飛行も無難に成功しました。 通信プロトコル構造体の定義、キャスト、タイマーの使用法、whileループでの関数呼び出しのヒントなど、組み込み開発に必要なコーディングノウハウを習得できます。 Cはちょっとわかっていますが、毎回LEDの点灯と消灯の例で実力のある方にこの講座を強くお勧めします。 講義を作るのに苦労しました。ありがとうございます〜
5.0
최영윤
こんにちは。 現在講義を聞いている大学生です。 難しい講義内容をよく解いて説明してくださり、難しい部分があれば質問掲示板またはカフェを通じてフィードバックをいただきますが、この部分が本当にインターネット講義で苦労できる部分を解消してくださって現場で聞く講義のように聞くことができてとても良いです。見ながら進道をたどって実習をしてみると勉強がたくさんなったようです。
5.0
20001540
仁川は回答がないか遅い点が最大のアロ店ですが、ここ人江は回答が速く、回答を100%してくれて最高です。
STM32F4 ベースの高性能ドローン飛行制御システムの開発
STM32CubeIDE の使い方
CubeMx の使い方
STM32F4 HAL および LL ドライバーの使用法 (主に LL を使用)
組み込みシステム開発プロセス
自作ドローンFC開発
9軸(BNO080)および6軸(ICM-20602)センサー、気圧センサー(LPS22HH)インターフェース
UBLOX NEO M8N インターフェイスおよびデータ解析(u-center 使用)
FlySky FS-iA6B 受信機インターフェース(iBus)およびデータパース、FS-i6 送信機設定
クワッドロータードローン機体の設定方法
TIM を使用した PWM の生成方法
ESC 較正と ESC プロトコルの種類 (Standard PWM、Oneshot、Multishot、Dshot など)
3DR テレメトリの設定 (3DR radio config の使用)
ドローン状態情報の送受信(センサーデータ、FS-i6送信機データ、バッテリー電圧、PID制御ゲインなど)
追加機能 - PIDゲインのEEPROM保存、バッテリー電圧チェック(ADC)および低電圧アラーム
安全のための機能 - 起動時のセンサー状態検査、Fail-safe など
ドローンの姿勢制御手法 - PID制御
シングル PID 制御理論と実験
ダブルPID制御理論と実験
こんにちはM-HIVE ChrisPです。
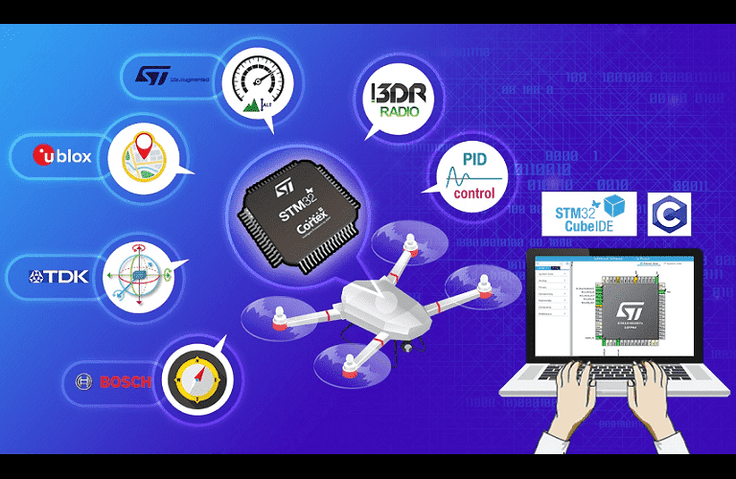
本講座はSTM32F4 Micro Controllerを利用した自作ドローンの開発講座で、ドローンの飛行制御システム(Flight Control System)開発のためのセンサーインターフェースからPID制御までの全過程を取り上げます。
他のドローン開発講座とは異なり、STM32F4を利用してセンサーインターフェースから始めてPID制御まで、すべてのソースコードを直接一つずつ作成する講義です。オープンソースを使用せずにすべての機能を直接1つずつ実装するため、ドローンを開発する過程と組み込みファームウェア開発過程を簡単に理解できます。
さらに、本講義で開発したドローンは、pixhawk、ardupilotなどの商用品に比べて性能が全く劣らないため、単純教育用ドローンを超えて研究用、産業用にも応用可能です。また、本講座で使用するMH-FC V2.2はドローンだけでなく、動く全ての無人移動体に適用可能なので、無人車のようなシステムにも応用できるでしょう!

| .jpg?w=960)
|
| 講義で使用するドローン部品 | 完成したドローンの様子 |
| 
|
| PID制御理論とコード実装 | センサーデータの受信とデータの可視化 |
| 
|
| 一軸PID制御テスト | 最終フライト |
講義は合計3つのパート、12のチャプターで構成されています。
パート1では、FC(Flight Controller)の基礎
パート2では、通信と追加機能
パート3では飛行制御(PID Control)
の順に進みます。
本講義ではSTM32F405RGT Cortex M4マイクロコントローラをメインプロセッサとして使用し、姿勢制御用のBNO080 9軸センサ、 ICM-20602 6軸センサと高度制御用のLPS22HH気圧センサを使用します。また、屋外自動飛行のためのUBLOX M8N GPSデータ受信まで扱います。 (ただし、高度制御とGPS制御は本講義では扱わない)
このコースの目的は、高性能ドローンを開発することですが、その開発プロセスについてより深く取り上げます。
ドローン飛行のための最も基本的なステップであるセンサーデータインターフェースから姿勢制御のためのPID Controlまでカバーします。
組み込みアプリケーションを開発するためのプロセスを集中的に説明し、それらを合わせてドローン飛行制御システムが完成します。
お得な動画講義になるよう常に努力します。
- M-HIVE ChrisP
学習対象は
誰でしょう?
고성능 드론의 기초부터 비행제어까지 하나씩 직접 개발하고 싶으신 분
STM32 を使用して、高度なアプリケーションを開発したい方
電気、通信、制御、機械、航空などの専攻学生
ドローン関連従事者
組み込みシステム開発プロセスを体験してみたい方
Arduino나 8bit MCU에서 32bit MCU로 넘어가려고 하시는 분
PID 制御の基本概念を学習し、実際に動作を実装したい方
高水準の組み込みプロジェクトを実践してみたい方
ドローン関連研究機関および教育機関
無人移動体に関するプロジェクトを進めている方
前提知識、
必要でしょうか?
この講座で使用される MH-FC V2.2 Flight Controller は必須です!! (なければ進行できません!! M-HIVE スマートストアで購入できます)
ドローン構成部品 (BLDC モーター、ESC、プロペラ、フレーム、バッテリーなど。M-HIVE ネイバー カフェでリストを確認してください)
Windows 系 PC および STM32CubeIDE
C言語中級以上が必要
基本的な回路知識が必要です
STM32F4 またはマイクロコントローラー (MCU) 開発経験必須
全体
53件 ∙ (31時間 21分)
全体
87件
5.0
87件の受講レビュー
受講レビュー 1
∙
平均評価 5.0
5
蜂蜜ジャム〜
星5点ありがとうございます〜 ひとつずつ実装しながら、さらに蜂蜜ジャムを感じることができるでしょうㅎㅎ 最後まで知り合い、面白い講義になるよう努力します。 ありがとうございます!
受講レビュー 3
∙
平均評価 5.0
5
普段組み込み製品の開発に関心を持っていました。いくつかのC言語の本とYouTubeの例に従うことには限界があった車にインフロンドローン開発講座を聞くようになりました。 LEDの点灯からPID制御まで、一つ一つずつ追従しながら組み込み製品開発ノウハウを学ぶことができました。各種センサデータを受信、処理し、無線送受信装置と通信しながら、限られた時間内にドローン姿勢を調整するコーディング方法を知りました。入念な説明に従ってコーディングしたところ、ドローン飛行も無難に成功しました。 通信プロトコル構造体の定義、キャスト、タイマーの使用法、whileループでの関数呼び出しのヒントなど、組み込み開発に必要なコーディングノウハウを習得できます。 Cはちょっとわかっていますが、毎回LEDの点灯と消灯の例で実力のある方にこの講座を強くお勧めします。 講義を作るのに苦労しました。ありがとうございます〜
こんにちはスターポイント5点ありがとうございます! 本講義で扱った外部装置と通信する内容、センサーインターフェースする方法、特定の周期で所望の動作を行うようにする方法などは非常に重要でよく使われる機能ですが、他の講義ではうまく扱わないようです。 どんな製品を開発しても、上記の内容は必ず知っておく必要があり、したがって、本講義ではそのような内容をより深く扱おうとしたが、うまく伝えられたことを願っています。 では、常に安全な飛行を願って、十分練習後に飛行をしてほしい! ありがとうございます。
受講レビュー 2
∙
平均評価 3.5
5
仁川は回答がないか遅い点が最大のアロ店ですが、ここ人江は回答が速く、回答を100%してくれて最高です。
評価5点ありがとうございます! 私もオンライン講義の限界をよく知っていて、できるだけ受講生の方々のお困りがあれば、できるだけ早く解決していこうと努力しています。 もちろん、オフラインよりも不足するはずですが、今後もご迷惑がございましたら、できるだけ早くお答えいたします。 それでは、安全で楽しいドローンを開発していただきたいと思います〜 ありがとう:)
受講レビュー 1
∙
平均評価 5.0
5
こんにちは。 現在講義を聞いている大学生です。 難しい講義内容をよく解いて説明してくださり、難しい部分があれば質問掲示板またはカフェを通じてフィードバックをいただきますが、この部分が本当にインターネット講義で苦労できる部分を解消してくださって現場で聞く講義のように聞くことができてとても良いです。見ながら進道をたどって実習をしてみると勉強がたくさんなったようです。
別点5点に受講評も本当にありがとうございます。 これから進んでいても質問がありましたら、いつでも質問させて頂ければ確認どおりに返信します。 それでは、安全で楽しいドローンを開発してください〜
知識共有者の他の講座を見てみましょう!
同じ分野の他の講座を見てみましょう!
無料