Everything about STM32 drone development starting from the ground up
※ This class has been completely free since September 2022.
This is the only class that teaches you how to develop the FCC flight control system for a high-performance STM32F4 DIY drone from start to finish using the free compiler STM32CubeIDE.
Since you implement everything from the sensor interface to PID control without using drone open source such as ArduPilot or Pixhawk, you can experience and learn all the development processes of the drone control system and embedded system.
We will explain all the source code and hardware assembly methods in the class slowly so that even non-majors and beginners can easily follow along.
If you follow along slowly, you can experience more stable flight with your own drone that you developed yourself than with commercial products.
I have always been interested in embedded product development. I was limited by following a few C language books and YouTube examples, so I took the Inflearn drone development course.
I was able to learn the know-how of embedded product development by following each step from turning on the LED to PID control. I learned the coding method to receive and process various sensor data, communicate with wireless transceivers, and adjust the drone's attitude within a limited time. I successfully flew the drone after following the detailed explanation and coding.
You can learn the coding know-how necessary for embedded development, such as defining communication protocol structures, type conversion, using timers, and calling functions in while loops. I strongly recommend this course to those who know a little bit about C but are stuck in the same situation with examples of turning the LED on and off every time.
Thank you for your hard work in creating the course. Thank you~
5.0
최영윤
83% enrolled
Hello. I am a college student currently taking the course. The lecture content that can be difficult is explained well, and if there is a difficult part, feedback is given through the Q&A board or cafe. This part really relieves the frustration that can be had in online lectures, so I can listen to it as if I am listening to the lecture in person, which is really great. I am new to stm32, but I feel like I have learned a lot by watching the lecture, following the progress, and practicing. Please continue to give good lectures, and if there is a lecture that interests me, I will look for it again!!!!!
5.0
20001540
100% enrolled
The biggest problem with online classes is that there are no replies or they are late, but this online class is the best because the replies are quick and 100% accurate.
What you will gain after the course
Development of high-performance drone flight control system based on STM32F4
This course is about developing a self-made drone using the STM32F4 Micro Controller. It covers the entire process from sensor interface to PID control for developing the drone's flight control system.
Unlike other drone development courses, this course uses STM32F4 to write all the source codes one by one , from the sensor interface to PID control. Since we implement all the functions one by one without using open source, you can easily understand the drone development process and embedded firmware development process.
In addition, the drone developed in this lecture is not inferior in performance to commercial products such as Pixhawk and Ardupilot, so it can be applied not only as a simple educational drone but also for research and industrial use . Also, the MH-FC V2.2 used in this lecture can be applied not only to drones but also to all moving unmanned vehicles , so it can be applied to systems such as unmanned cars!
CH8. Wireless data transmission and reception (transmission of aircraft status information and reception of control parameters, use of GCS for lectures)
CH9. Safety functions (Fail-safe, etc. functions for safety)
Part 3Flight Control (PID Control)
CH10. PID control preparation
CH11. Roll, Pitch Control (Double PID)
CH12. Heading Control (Single PID)
It proceeds in this order.
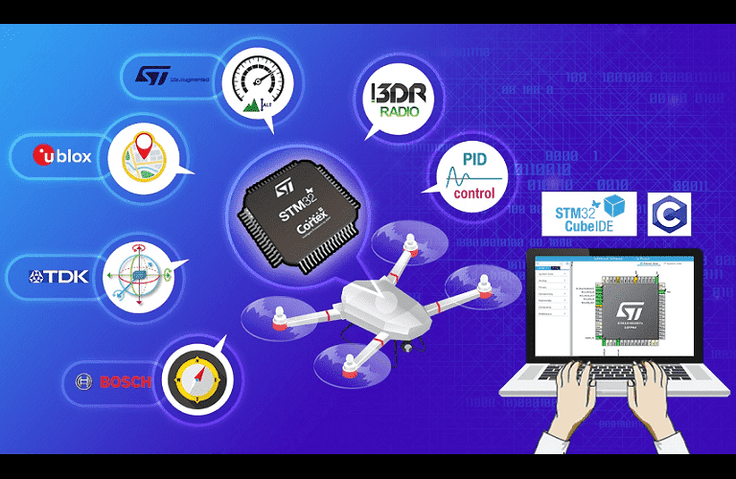
This lecture uses the STM32F405RGT Cortex M4 microcontroller as the main processor, the BNO080 9-axis sensor for attitude control, the ICM-20602 6-axis sensor , and the LPS22HH barometric pressure sensor for altitude control. It also covers the UBLOX M8N GPS data reception for outdoor automatic flight. (However, altitude control and GPS control are not covered in this lecture.)
The goal of this course is to develop a high-performance drone, but it goes into more depth about the process of developing one.
It covers everything from the sensor data interface, which is the most basic step for drone flight, to PID Control for attitude control.
We will focus on the processes for developing embedded applications, and combine them to complete a drone flight control system.
We will always strive to provide useful video lectures.
- M-HIVE ChrisP
Recommended for these people
Who is this course right for?
Those who want to develop high-performance drones from the basics to flight control
If you want to develop a deep application using STM32
Students majoring in electronics, communications, control, machinery, aviation, etc.
Drone related workers
Those who want to experience the embedded system development process
If you are trying to move from Arduino or 8bit MCU to 32bit MCU
Those who want to learn the basic concepts of PID control and implement them directly
Those who want to practice high-level embedded projects
Research and educational institutions related to drones
People who are working on projects related to unmanned vehicles
Need to know before starting?
The MH-FC V2.2 Flight Controller is essential for this course!! (If you don't have it, you can't proceed!! You can purchase it from the M-HIVE Smart Store)
Drone components (BLDC motor, ESC, propeller, frame, battery, etc. Check the list on the M-HIVE Naver cafe)
Windows PC and STM32CubeIDE
Intermediate or higher level of C language required
Basic circuit knowledge required
STM32F4 or Microcontroller (MCU) development experience required
The biggest problem with online classes is that there are no replies or they are late, but this online class is the best because the replies are quick and 100% accurate.
Thank you so much for your 5-star rating!
I am well aware of the limitations of online lectures, so I will try my best to resolve any issues students may have as quickly as possible.
Of course, it may not be as good as offline lectures, but I will try my best to respond to any issues you may have in the future as quickly as possible.
Then, I hope you have a safe and enjoyable drone development~
Thank you :)
I'm sure you've prepared a lot, but from the perspective of checking, it all came out in an instant.
I'm glad you explained it in an easy-to-understand way, and please hurry up and give me the next lecture~~~~~~~~~~
I'll wait.
Thank you for the 5-star rating. ㅎㅎ
I will prepare the remaining lectures so that they are easy to understand and follow.
I apologize for the delays due to various circumstances. ㅠㅠ
I will proceed as quickly as possible!
Thank you~
I have always been interested in embedded product development. I was limited by following a few C language books and YouTube examples, so I took the Inflearn drone development course.
I was able to learn the know-how of embedded product development by following each step from turning on the LED to PID control. I learned the coding method to receive and process various sensor data, communicate with wireless transceivers, and adjust the drone's attitude within a limited time. I successfully flew the drone after following the detailed explanation and coding.
You can learn the coding know-how necessary for embedded development, such as defining communication protocol structures, type conversion, using timers, and calling functions in while loops. I strongly recommend this course to those who know a little bit about C but are stuck in the same situation with examples of turning the LED on and off every time.
Thank you for your hard work in creating the course. Thank you~
Hello, thank you so much for the 5-star rating!
The contents covered in this lecture, such as communicating with external devices, how to interface with sensors, and how to perform desired actions at specific intervals, are very important and frequently used functions, but I think they are not covered well in other lectures.
No matter what product you develop, you must know the contents above, so I tried to cover those contents in more depth in this lecture, so I hope it was conveyed well.
Then, I hope you always fly safely, and I hope you fly after practicing enough!
Thank you.
Thank you for the 5-star rating~
You will feel more and more fun as you implement them one by one ㅎㅎ
I will try my best to make the lecture informative and fun until the end.
Thank you!!
Hello. I am a college student currently taking the course. The lecture content that can be difficult is explained well, and if there is a difficult part, feedback is given through the Q&A board or cafe. This part really relieves the frustration that can be had in online lectures, so I can listen to it as if I am listening to the lecture in person, which is really great. I am new to stm32, but I feel like I have learned a lot by watching the lecture, following the progress, and practicing. Please continue to give good lectures, and if there is a lecture that interests me, I will look for it again!!!!!
Thank you so much for the 5-star review.
If you have any questions while you are going forward, please feel free to ask and I will reply as soon as I check!
Then, I hope you have a safe and enjoyable drone development~


.jpg?w=960)