※ Khóa học này đã được miễn phí hoàn toàn từ tháng 9 năm 2022.
Đây là khóa học duy nhất hướng dẫn bạn tự phát triển toàn bộ hệ thống điều khiển bay FCC cho máy bay không người lái tự chế STM32F4 hiệu suất cao bằng trình biên dịch miễn phí STM32CubeIDE.
Vì không sử dụng các phần mềm nguồn mở cho máy bay không người lái như ArduPilot hay Pixhawk mà tự thực hiện toàn bộ từ giao diện cảm biến đến điều khiển PID nên bạn có thể trải nghiệm và học hỏi toàn bộ quá trình phát triển hệ thống điều khiển máy bay không người lái và hệ thống nhúng.
Để những người không chuyên ngành và người mới bắt đầu cũng có thể dễ dàng theo dõi, chúng tôi sẽ giải thích từng phần mã nguồn và cách lắp ráp phần cứng trong lớp học.
Chỉ cần làm theo từng bước, bạn sẽ có thể trải nghiệm chuyến bay ổn định hơn so với các sản phẩm thương mại bằng máy bay không người lái do chính mình phát triển.
Tôi luôn quan tâm đến việc phát triển sản phẩm nhúng. Vì tôi có ít thời gian theo dõi một số sách ngôn ngữ C và các ví dụ trên YouTube nên tôi đã tham gia khóa học phát triển máy bay không người lái Infron.
Tôi có thể học bí quyết phát triển sản phẩm nhúng bằng cách làm theo từng hướng dẫn một, từ bật đèn LED đến điều khiển PID. Tôi đã học cách viết mã để điều chỉnh thái độ của máy bay không người lái trong một thời gian giới hạn bằng cách nhận và xử lý nhiều dữ liệu cảm biến khác nhau cũng như liên lạc với các thiết bị truyền và nhận không dây. Tôi đã mã hóa theo hướng dẫn chi tiết và chuyến bay không người lái đã thành công.
Bạn có thể tìm hiểu bí quyết mã hóa cần thiết cho phát triển nhúng, chẳng hạn như định nghĩa cấu trúc giao thức truyền thông, chuyển đổi loại, cách sử dụng bộ tính giờ và cách gọi các hàm trong vòng lặp while. Tôi thực sự giới thiệu khóa học này cho những người biết một số C nhưng thiếu kỹ năng trong ví dụ bật và tắt đèn LED mọi lúc.
Cảm ơn bạn đã làm việc chăm chỉ để tạo ra bài giảng. Cảm ơn bạn~
5.0
최영윤
83% đã tham gia
Xin chào. Tôi là một sinh viên đại học hiện đang tham gia lớp học. Anh giải thích nội dung bài giảng hay, có phần khó, nếu có phần khó thì anh phản hồi qua bảng câu hỏi hoặc cafe. Phần này thực sự giải tỏa phần nào những phần bực bội của bài giảng trực tuyến nên tôi có thể nghe như thể mình đang học. đang tham gia một bài giảng trong lĩnh vực này, vì vậy tôi thực sự thích nó. Đây là lần đầu tiên tôi sử dụng stm32 và tôi nghĩ rằng tôi đã học được rất nhiều điều khi xem bài giảng, theo dõi tiến trình và thực hành. Chúc các bạn sau này có bài giảng hay, nếu có bài giảng nào mình quan tâm mình sẽ tìm lại!!!!!
5.0
20001540
100% đã tham gia
Vấn đề lớn nhất của bài giảng trực tuyến là không có hoặc trả lời chậm, nhưng bài giảng trực tuyến này là tốt nhất vì nó phản hồi nhanh chóng và 100%.
Bạn sẽ nhận được điều này sau khi học.
Phát triển hệ thống điều khiển bay máy bay không người lái hiệu suất cao dựa trên STM32F4
Cách sử dụng STM32CubeIDE
Cách sử dụng CubeMx
Cách sử dụng trình điều khiển HAL và LL của STM32F4 (chủ yếu sử dụng LL)
Quy trình phát triển hệ thống nhúng
개발 자작 드론 FC
Giao diện cảm biến 9 trục (BNO080) và 6 trục (ICM-20602), cảm biến áp suất (LPS22HH)
Giao diện và phân tích dữ liệu UBLOX NEO M8N (sử dụng u-center)
Giao diện thu FlySky FS-iA6B (iBus) và phân tích dữ liệu, cài đặt bộ phát FS-i6
Cách thiết lập máy bay không người lái bốn cánh
TIM tạo ra PWM bằng cách nào
Hiệu chuẩn ESC và các loại giao thức ESC (Standard PWM, Oneshot, Multishot, Dshot, v.v.)
Cài đặt 3DR Telemetry (sử dụng 3DR radio config)
Gửi và nhận thông tin trạng thái của máy bay không người lái (dữ liệu cảm biến, dữ liệu điều khiển FS-i6, điện áp pin, hệ số điều khiển PID, v.v.)
Tính năng bổ sung - Lưu trữ PID gain vào EEPROM, kiểm tra điện áp pin (ADC) và báo động điện áp thấp
Các tính năng đảm bảo an toàn - Kiểm tra trạng thái cảm biến khi khởi động, Fail-safe, v.v.
Kỹ thuật điều khiển tư thế của máy bay không người lái - Điều khiển PID
Độc lập PID kiểm soát lý thuyết và thực nghiệm
이중 PID kiểm soát lý thuyết và thực nghiệm
※ Khóa học này được thực hiện hoàn toàn miễn phí kể từ ngày 22 tháng 9. Hãy nhớ đánh giá khóa học và đăng ký kênh YouTube của Mhive !
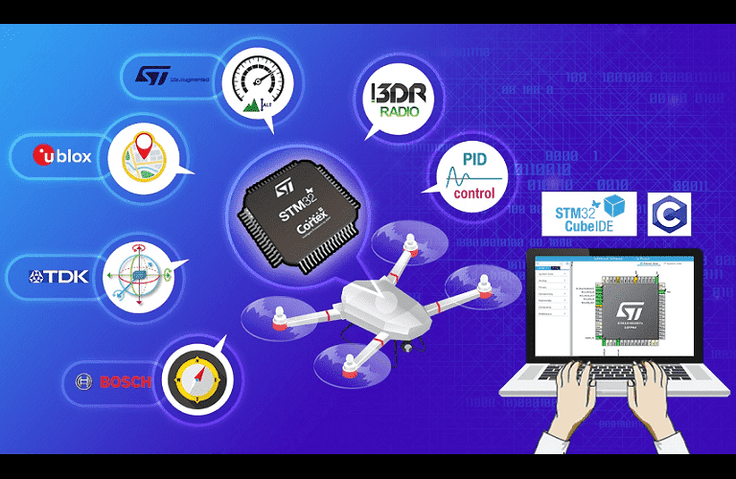
Khóa học này là khóa học phát triển máy bay không người lái tự chế bằng Bộ điều khiển vi mô STM32F4 và bao gồm toàn bộ quá trình từ giao diện cảm biến đến điều khiển PID để phát triển hệ thống điều khiển chuyến bay của máy bay không người lái.
Không giống như các khóa học phát triển máy bay không người lái khác, khóa học này sử dụng STM32F4 để viết từng mã nguồn một, bắt đầu từ giao diện cảm biến đến điều khiển PID. Bởi vì tất cả các chức năng được triển khai trực tiếp từng cái một mà không cần sử dụng nguồn mở, bạn có thể dễ dàng hiểu được quy trình phát triển máy bay không người lái và quy trình phát triển phần mềm nhúng.
Ngoài ra, máy bay không người lái được phát triển trong bài giảng này có hiệu suất không thua kém các sản phẩm thương mại như pixhawk và ardupilot, vì vậy nó có thể được áp dụng cho mục đích nghiên cứu và công nghiệp ngoài máy bay không người lái giáo dục đơn giản . Ngoài ra, MH-FC V2.2 được sử dụng trong khóa học này không chỉ có thể được áp dụng cho máy bay không người lái mà còn cho tất cả các phương tiện không người lái đang di chuyển , do đó, nó cũng có thể được áp dụng cho các hệ thống như ô tô không người lái!
Các bộ phận của Drone dùng trong bài giảng
Ngoại hình của chiếc drone đã hoàn thiện
Lý thuyết điều khiển PID và thực hiện mã
Tiếp nhận dữ liệu cảm biến và trực quan hóa dữ liệu
CH4. Tiếp nhận dữ liệu máy thu (máy phát FS-i6, máy thu FS-iA6B)
CH5. Cài đặt máy bay (QAV210)
CH6. Ổ đĩa động cơ (Oneshot125PWM)
Ở Phần 2,giao tiếp và các chức năng bổ sung
CH7. Các chức năng bổ sung (EEPROM, kiểm tra điện áp pin, loại bỏ con quay hồi chuyển, hiệu chỉnh BNO080)
CH8. Truyền dữ liệu không dây (truyền thông tin trạng thái tàu bay và tiếp nhận các thông số điều khiển, cách sử dụng GCS cho bài giảng)
CH9. Chức năng an toàn (chức năng an toàn như an toàn)
Phần 3 : Điều khiển bay (PID Control)
CH10. Chuẩn bị điều khiển PID
CH11. Điều khiển cuộn, cao độ (PID kép)
CH12. Điều khiển tiêu đề (PID đơn)
Nó tiến hành theo thứ tự sau.
Trong bài giảng này, bộ vi điều khiển STM32F405RGT Cortex M4 được sử dụng làm bộ xử lý chính, cảm biến 9 trục BNO080 để điều khiển thái độ, cảm biến 6 trục ICM-20602 và cảm biến áp suất khí quyển LPS22HH để điều khiển độ cao. Nó cũng bao gồm việc tiếp nhận dữ liệu GPS UBLOX M8N cho chuyến bay tự động ngoài trời. (Tuy nhiên, việc kiểm soát độ cao và kiểm soát GPS không được đề cập trong bài giảng này)
Mục đích của khóa học này là phát triển máy bay không người lái hiệu suất cao, nhưng quá trình phát triển sẽ được đề cập sâu hơn.
Nó bao gồm mọi thứ từ giao diện dữ liệu cảm biến, bước cơ bản nhất cho chuyến bay không người lái, đến Điều khiển PID để kiểm soát thái độ.
Chúng tôi sẽ tập trung giải thích quy trình phát triển các ứng dụng nhúng và kết hợp chúng để hoàn thiện hệ thống điều khiển chuyến bay không người lái.
Chúng tôi sẽ luôn cố gắng cung cấp những video bài giảng hữu ích.
- M-HIVE ChrisP
Khuyến nghị cho những người này
Khóa học này dành cho ai?
고성능 드론의 기초부터 비행제어까지 직접 개발하고 싶으신 분
STM32 để phát triển các ứng dụng sâu hơn
Sinh viên chuyên ngành điện tử, viễn thông, điều khiển, cơ khí, hàng không, v.v.
Nhân viên liên quan đến máy bay không người lái
임베디드 시스템 개발 프로세스를 경험해보고 싶으신 분
Bạn muốn chuyển từ Arduino hoặc MCU 8bit sang MCU 32bit
PID Control là khái niệm cơ bản mà bạn muốn học và tự thực hiện
고수준 임베디드 프로젝트를 실습해보고 싶으신 분
Các tổ chức nghiên cứu và giáo dục liên quan đến máy bay không người lái
무인 이동체 관련 프로젝트를 진행하는 분
Cần biết trước khi bắt đầu?
Bộ điều khiển bay MH-FC V2.2 là thiết bị bắt buộc phải có trong khóa học này!! (Nếu không có, bạn sẽ không thể tiến hành khóa học!! Có thể mua tại cửa hàng thông minh M-HIVE)
Các thành phần của máy bay không người lái (động cơ BLDC, ESC, cánh quạt, khung, pin, v.v. Hãy xem danh sách tại diễn đàn M-HIVE trên Naver)
PC hệ điều hành Windows và STM32CubeIDE
Yêu cầu kiến thức C ngôn ngữ cấp trung trở lên
Yêu cầu kiến thức về mạch cơ bản
Bắt buộc phải có kinh nghiệm phát triển STM32F4 hoặc vi điều khiển (MCU)
Tôi luôn quan tâm đến việc phát triển sản phẩm nhúng. Vì tôi có ít thời gian theo dõi một số sách ngôn ngữ C và các ví dụ trên YouTube nên tôi đã tham gia khóa học phát triển máy bay không người lái Infron.
Tôi có thể học bí quyết phát triển sản phẩm nhúng bằng cách làm theo từng hướng dẫn một, từ bật đèn LED đến điều khiển PID. Tôi đã học cách viết mã để điều chỉnh thái độ của máy bay không người lái trong một thời gian giới hạn bằng cách nhận và xử lý nhiều dữ liệu cảm biến khác nhau cũng như liên lạc với các thiết bị truyền và nhận không dây. Tôi đã mã hóa theo hướng dẫn chi tiết và chuyến bay không người lái đã thành công.
Bạn có thể tìm hiểu bí quyết mã hóa cần thiết cho phát triển nhúng, chẳng hạn như định nghĩa cấu trúc giao thức truyền thông, chuyển đổi loại, cách sử dụng bộ tính giờ và cách gọi các hàm trong vòng lặp while. Tôi thực sự giới thiệu khóa học này cho những người biết một số C nhưng thiếu kỹ năng trong ví dụ bật và tắt đèn LED mọi lúc.
Cảm ơn bạn đã làm việc chăm chỉ để tạo ra bài giảng. Cảm ơn bạn~
Xin chào, cảm ơn bạn rất nhiều vì đã đánh giá 5 sao!
Nội dung được đề cập trong bài giảng này, chẳng hạn như giao tiếp với các thiết bị bên ngoài, cách giao tiếp với cảm biến và cách thực hiện các hoạt động mong muốn ở các chu kỳ cụ thể, là những chức năng rất quan trọng và được sử dụng thường xuyên, nhưng chúng dường như không được đề cập rõ trong các bài giảng khác. .
Dù bạn phát triển sản phẩm gì thì bạn cũng phải biết những nội dung trên nên tôi đã cố gắng trình bày những nội dung đó sâu hơn trong bài giảng này và tôi hy vọng nó được truyền tải tốt.
Vì vậy, tôi hy vọng bạn luôn bay an toàn và bay sau khi luyện tập đầy đủ!
Cảm ơn
Cảm ơn bạn rất nhiều vì đã đánh giá 5 sao!
Tôi nhận thức rõ những hạn chế của bài giảng trực tuyến nên tôi cố gắng hết sức để giải quyết mọi khó khăn mà học viên gặp phải một cách nhanh nhất.
Tất nhiên có thể là chưa đủ so với offline nhưng nếu sau này bạn gặp khó khăn gì, chúng tôi sẽ phản hồi nhanh nhất có thể.
Sau đó, tôi hy vọng bạn phát triển được một chiếc máy bay không người lái an toàn và thú vị.
Cảm ơn :)
Chắc hẳn bạn đã chuẩn bị rất nhiều, nhưng xét từ góc độ kiểm tra thì mọi việc đã hoàn thành rất nhanh chóng.
Tôi rất vui vì bạn đã giải thích nó một cách dễ hiểu. Xin hãy giảng nhanh cho tôi bài giảng tiếp theo~~~~~~~~~~
Tôi sẽ đợi.
Cảm ơn bạn vì 5 sao haha
Chúng tôi sẽ chuẩn bị các bài giảng còn lại một cách dễ hiểu, dễ làm theo.
Chúng tôi xin lỗi vì sự chậm trễ liên tục do nhiều trường hợp khác nhau.
Chúng tôi sẽ tiến hành nhanh nhất có thể!
Cảm ơn bạn~
Xin chào. Tôi là một sinh viên đại học hiện đang tham gia lớp học. Anh giải thích nội dung bài giảng hay, có phần khó, nếu có phần khó thì anh phản hồi qua bảng câu hỏi hoặc cafe. Phần này thực sự giải tỏa phần nào những phần bực bội của bài giảng trực tuyến nên tôi có thể nghe như thể mình đang học. đang tham gia một bài giảng trong lĩnh vực này, vì vậy tôi thực sự thích nó. Đây là lần đầu tiên tôi sử dụng stm32 và tôi nghĩ rằng tôi đã học được rất nhiều điều khi xem bài giảng, theo dõi tiến trình và thực hành. Chúc các bạn sau này có bài giảng hay, nếu có bài giảng nào mình quan tâm mình sẽ tìm lại!!!!!
Cảm ơn bạn rất nhiều vì đánh giá 5 sao của bạn.
Nếu bạn có bất kỳ câu hỏi nào khi tiếp tục, vui lòng đăng chúng và chúng tôi sẽ trả lời ngay khi chúng tôi xác nhận chúng!
Sau đó, tôi hy vọng bạn phát triển được một chiếc máy bay không người lái an toàn và thú vị!
Cảm ơn bạn vì 5 sao~
Bạn sẽ có thể có nhiều niềm vui hơn khi thực hiện từng cái một haha.
Tôi sẽ cố gắng hết sức để làm cho bài giảng có nhiều thông tin và thú vị cho đến cuối cùng.
Cảm ơn!!


.jpg?w=960)